Programmatic Scenario Authoring
drivingScenario objectThe drivingScenario object enables
you to author driving scenarios from the MATLAB® command line. Use this object to design complex road networks
or parking lots and specify actors and their trajectories. You can then
generate synthetic data from these scenarios by using sensor models and
visualize this data on a bird's-eye plot.
Functions
Topics
Driving Scenarios
- Create Driving Scenario Programmatically
Programmatically create ground truth driving scenarios for synthetic sensor data and tracking algorithms. - Define Road Layouts Programmatically
Programmatically create road junctions and combine these junctions to create more complicated road networks. - Simulate Vehicle Parking Maneuver in Driving Scenario
Simulate a parking maneuver and generate sensor detections in a large parking lot using a cuboid driving scenario. - Create Actor and Vehicle Trajectories Programmatically
Programmatically create actor and vehicle trajectories for a driving scenario. - Visualize Sensor Coverage, Detections, and Tracks
Configure and use a bird's-eye plot to display sensor coverage, detections, and tracking results around the ego vehicle. - Automate Control of Intelligent Vehicles by Using Stateflow Charts
Model a highway scenario with intelligent vehicles that are controlled by decision logic defined by a Stateflow® chart.
Sensors
- Model Radar Sensor Detections
Model and simulate the output of an automotive radar sensor for various driving scenarios. - Radar Signal Simulation and Processing for Automated Driving
Model the hardware, signal processing, and propagation environment of a radar for a driving scenario. - Simulate Radar Ghosts Due to Multipath Return
Generate ghost targets that occur when signal energy is reflected off another target before returning to the radar. - Model Vision Sensor Detections
Model and simulate the output of an automotive vision sensor for various driving scenarios. - Simulate Inertial Sensor Readings from a Driving Scenario (Navigation Toolbox)
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™.
Featured Examples
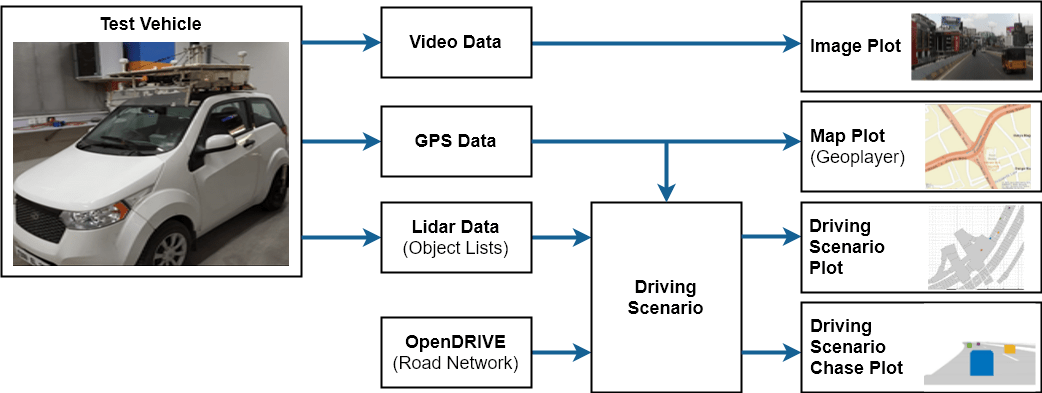
Scenario Generation from Recorded Vehicle Data
Automatically generate virtual driving scenarios from recorded vehicle data.

Automatic Scenario Generation
Automate scenario generation by using a drivingScenario object. In this example, you will automate:
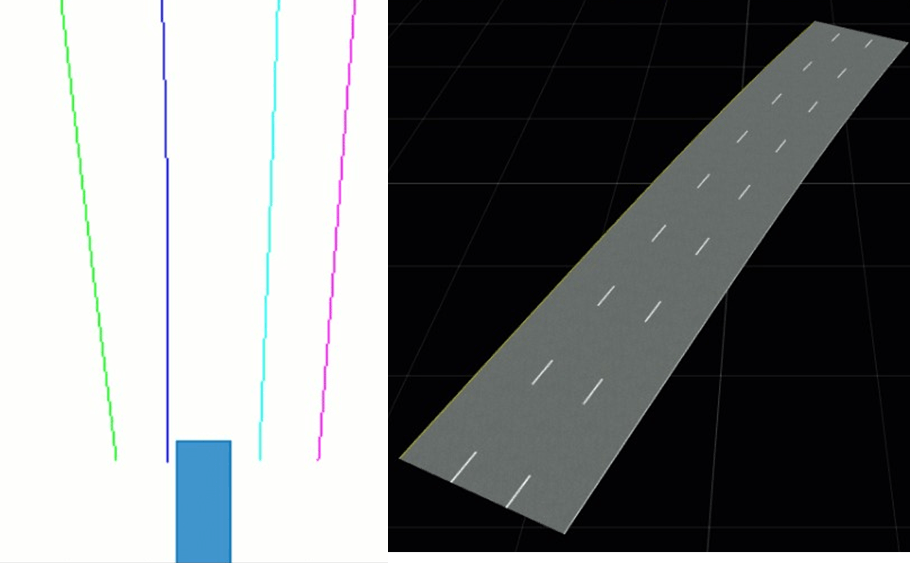
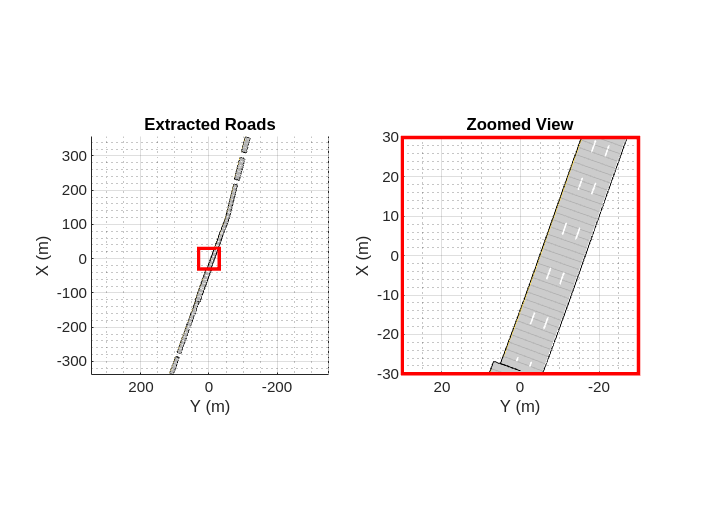
Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data.
Generate Scenario from Actor Track Data and GPS Data
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data.

Generate Scenario Variants for Testing AEB Pedestrian Systems
Generate scenario variants to test automated emergency braking (AEB) system using car-to-pedestrian European New Car Assessment Programme (Euro NCAP) test scenario.