Vector Control
Field-Oriented Control (FOC), helps you achieve high-performance dynamics in both Permanent Magnet Synchronous Motors (PMSM) and Induction Motors. The fundamental principle of FOC is the decoupling of stator current vectors into two orthogonal components: one for magnetic flux and the other for torque production. This decoupling is facilitated by mathematical abstractions known as the Clarke and Park transformations. First, the Clarke transformation converts the three-phase stationary current signals into a two-phase stationary alpha-beta frame. Subsequently, the Park transformation rotates these stationary vectors into a synchronous d-q frame that rotates in alignment with the rotor's magnetic field. By converting complex AC waveforms into DC-like quantities, FOC allows for the independent and precise control of torque and flux.
The Simulink model that you create using Motor Control Blockset can be used to integrate the power inverter, the motor’s mathematical representation, and the FOC algorithm consisting of nested Proportional-Integral (PI) control loops. You can simulate FOC for both PMSM and Induction Motors by adjusting the machine block parameters and the specific flux estimation logic required for each motor type.
Motor Control Blockset also supports Direct torque control (DTC), which is a vector motor control technique that implements motor speed control by directly controlling the flux and torque of the motor. Unlike field-oriented control (FOC) that controls d- and q-axis motor currents, the DTC algorithm estimates the torque and flux values from the motor position and currents. Then it uses PI controllers to control the motor torque and flux to eventually generate the optimum voltages that run the motor.
Note
The blocks listed here are compliant with the MISRA C™ guidelines.
Functions
mcb.PMSMCharacteristics | Compute and plot PMSM drive characteristics and constraint curves (Since R2022b) |
mcb.ACIMCharacteristics | Compute and plot ACIM characteristic curves (Since R2022a) |
mcb.getPIControllerParameters | Compute gains for PI controller in field-oriented control |
mcb.calcFOCGains | Compute gains and transfer functions for PI controller in field-oriented control of PMSM (Since R2025a) |
mcb.getMotorControlAnalysis | Frequency-domain analysis plots for PI controller of field-oriented control |
Blocks
Topics
- Field-Oriented Control
Implement speed control for PMSM and induction motor by using field-oriented control.
- Design Field-Oriented Control Algorithm
Design and integrate the torque-control and speed-control subsystems.
- Field-Weakening Control
Implement control for speeds above base speed for PMSM and induction motor by using field-weakening control.
- Code Verification and Profiling Using PIL Testing
This example explains PIL profiling on Texas Instruments® LAUNCHXL-F28379D hardware board.
- How to Use Single Shunt FOC Library Blocks
This example shows how to use the Simulink blocks for single shunt FOC available with Motor Control Blockset™.
- Direct Torque Control (DTC)
Implement speed control for PMSM by controlling motor flux and torque.
Featured Examples

Field-Oriented Control of PMSM Using SI Units
Implements the Field-Oriented Control (FOC) technique to control the speed of a three-phase Permanent Magnet Synchronous Motor (PMSM). However, instead of the per-unit representation of quantities (for details about the per-unit system, see Per-Unit System), the FOC algorithm in this example uses the SI units of signals to perform the computations. These are the signals and their SI units:
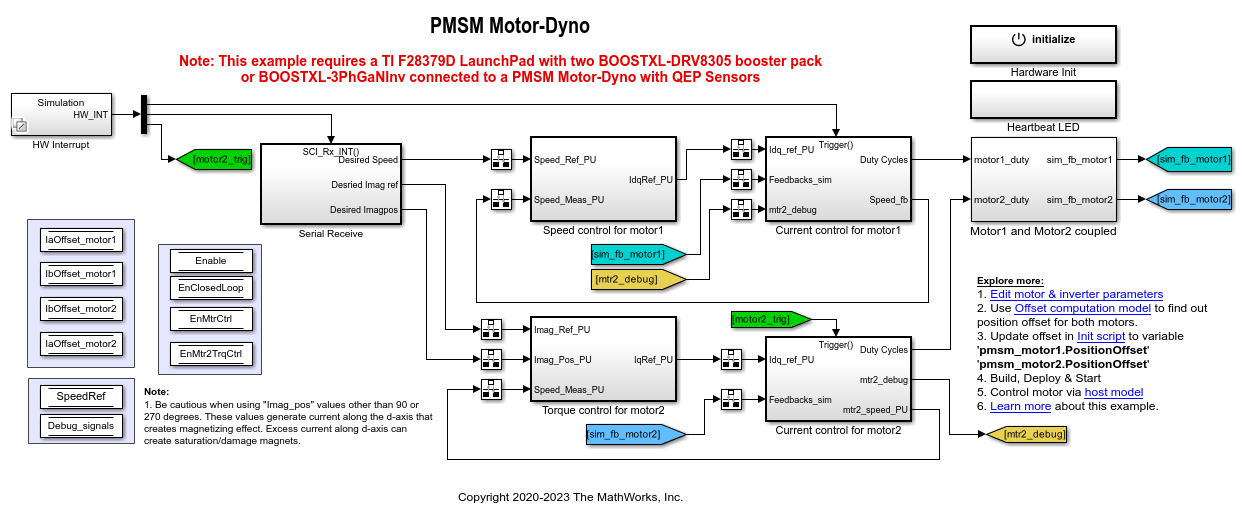
Control PMSM Loaded with Dual Motor (Dyno)
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

Model Switching Dynamics in Inverter Using Simscape Electrical
Uses field-oriented control (FOC) to control the speed of a three-phase permanent magnet synchronous motor (PMSM). It gives you the option to use these Simscape™ Electrical™ blocks as an alternative to the Average Value Inverter block in Motor Control Blockset™:

Field-Oriented Control of Induction Motor Using Speed Sensor
Implements the field-oriented control (FOC) technique to control the speed of a three-phase AC induction motor (ACIM). The FOC algorithm requires rotor speed feedback, which is obtained in this example by using a quadrature encoder sensor. For details about FOC, see Field-Oriented Control.

Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see Field-Oriented Control.
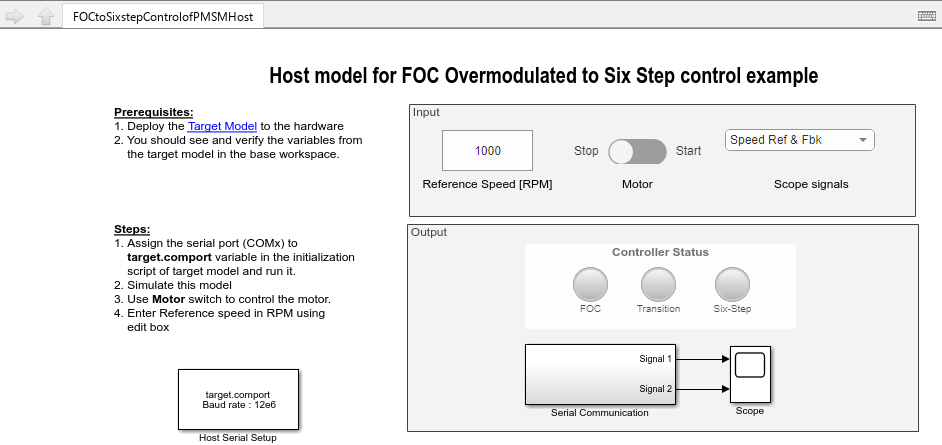
Field-oriented Control of PMSM with Six-Step Transition
Implement dynamic overmodulation to control a surface-mount permanent magnet synchronous motor (SPMSM) using field-oriented control (FOC). When the motor needs to reach higher speeds or produce more torque, the control method seamlessly transitions to six-step control. This allows the motor application to achieve better range without increasing the DC bus voltage of the inverter.
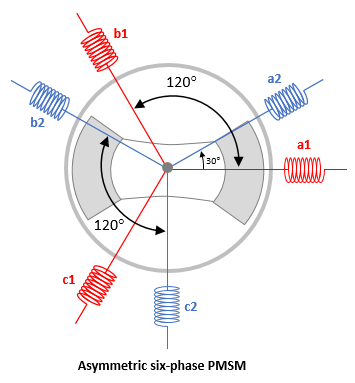
Field-Oriented Control of Six-Phase PMSM
Control the torque of an asymmetric six-phase permanent magnet synchronous motor (PMSM) using field-oriented control (FOC).
Control PMSM Loaded with Dual Motor (Dyno)
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.

FOC of PMSM Using FPGA-Based Motor Control Development Kit
Use a Field-Oriented Control (FOC) algorithm for a Permanent Magnet Synchronous Motor (PMSM) by using blocks from the Motor Control Blockset™ on an FPGA device (Trenz Electronic™ Motor Control Development Kit TE0820).

Field-Weakening Control (with MTPA) of PMSM
Implements the field-oriented control (FOC) technique to control the torque and speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For details about FOC, see Field-Oriented Control.
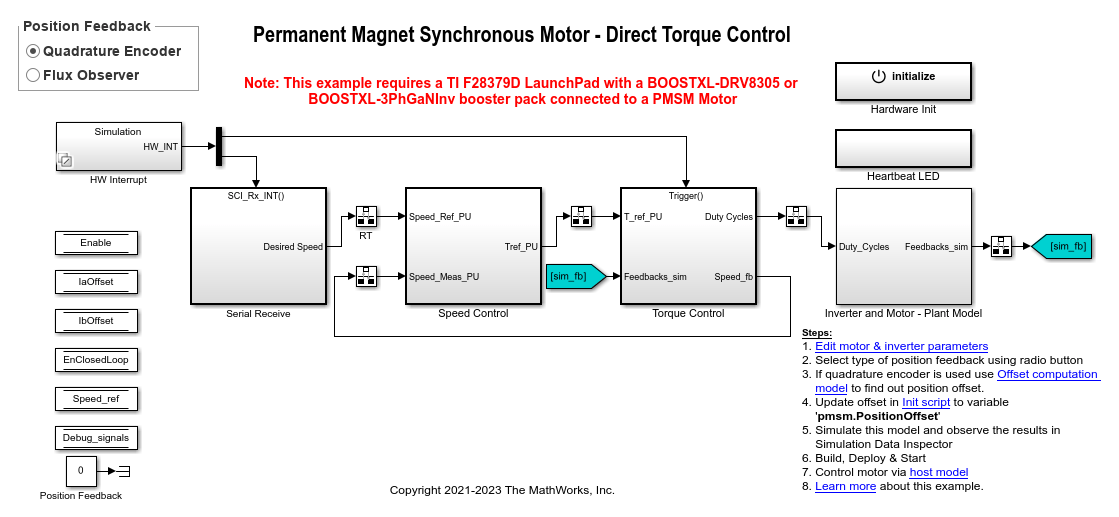
Direct Torque Control of PMSM Using Quadrature Encoder or Sensorless Flux Observer
Implements direct torque control (DTC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). Direct Torque Control (DTC) is a vector motor control technique that implements motor speed control by directly controlling the flux and torque of the motor. The example algorithm needs motor currents and position feedback from PMSM. It uses space vector pulse-width modulation (DTC-SVPWM) variant of DTC, which uses space vector modulation (SVM) to produce the pulse-width modulation (PWM) duty cycles that are used by the inverter. For more details about the DTC-SVPWM algorithm used in this example, see Direct Torque Control (DTC).