mcb.ACIMCharacteristics
Description
Examples
Get parameters for your motor and inverter. This example uses an EM_Synergy ACIM and DRV8312-C2-KIT inverter.
acim = mcb.getACIMParameters("EM_Synergy"); inverter = mcb.getInverterParameters("DRV8312-C2-KIT");
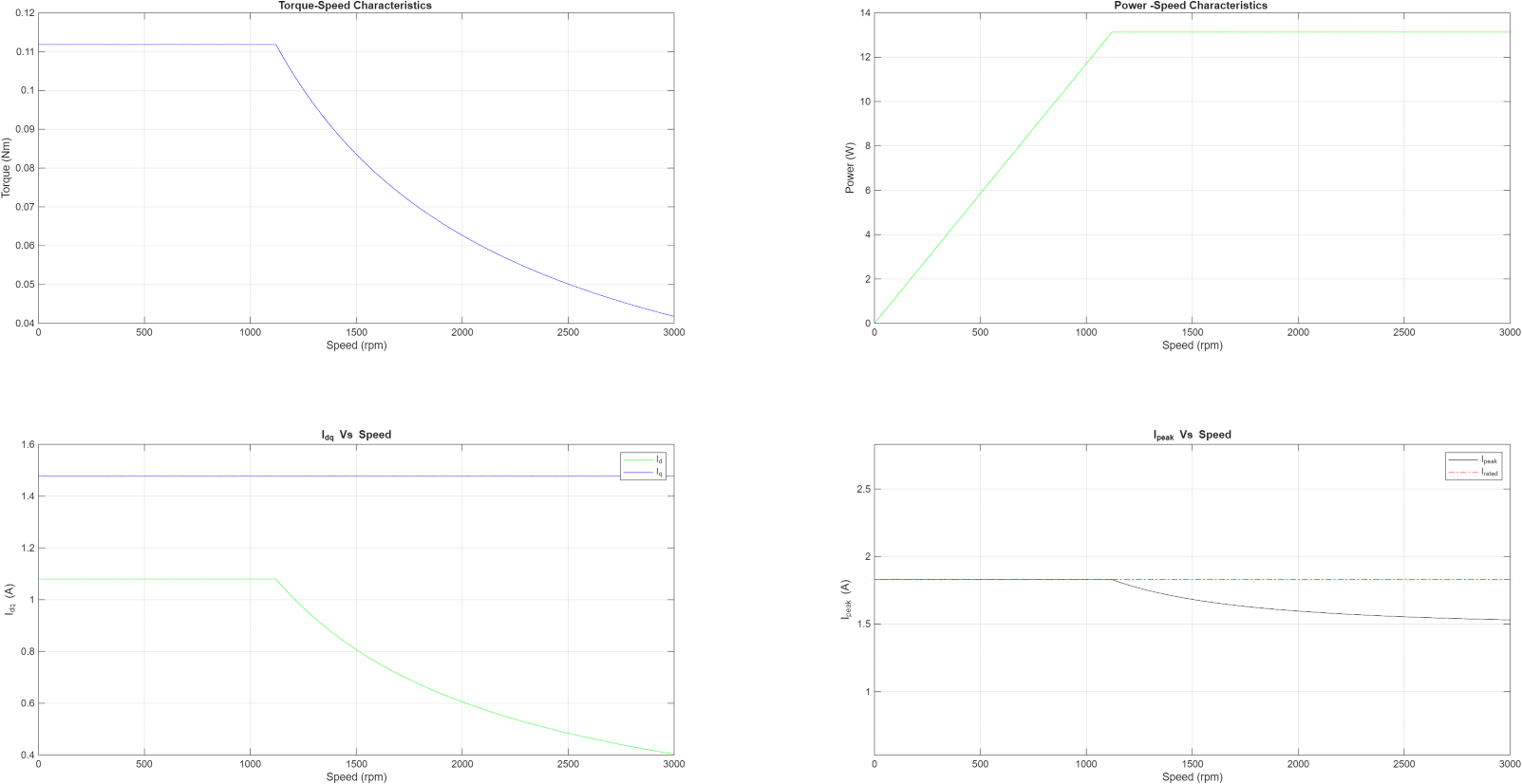
Plot characteristic curves.
mcb.ACIMCharacteristics(acim,inverter)