Field-Oriented Current Controller
Implement current control for three-phase motors using field-oriented control (FOC) technique
Since R2023b
Libraries:
Motor Control Blockset /
Controls /
Controllers
Description
The Field-Oriented Current Controller block implements current control for a three-phase permanent magnet synchronous motor (PMSM) or an AC induction motor (ACIM) using the FOC algorithm. You can input the reference d- and q-axis currents, measured stator phase a and b currents, motor electrical position, as well as PI controller parameters to compute three phase voltages that drive the motor.
The block uses Clarke and Park transformations to compute actual d- and q-axis currents from the measured phase currents and motor electrical position. It uses the PI Controller blocks to implement d- and q-axis current controllers. The current controller loop uses the reference and actual d- and q- axis currents to generate reference voltages that drive the motor. For more information about the FOC algorithm implemented by the block, see Field-Oriented Control.
The block supports SI and per-unit inputs, however, units of all block inputs should be identical.
Examples
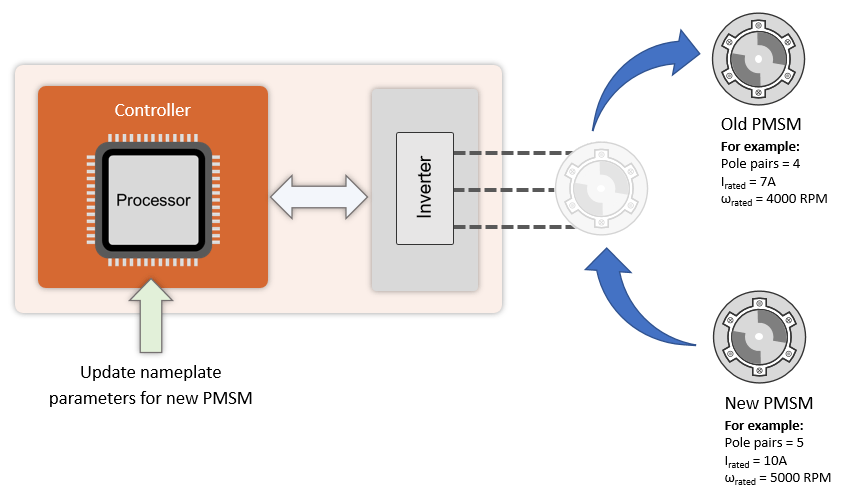
Swap Motors with Single Model Deployment of Sensor-Based FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using position-sensor-based field-oriented control (FOC). Industrial drives enable you to swap motors in real-time without repeated deployment of code. An industrial drive setup needs a fixed inverter and software that has the ability to adapt the control algorithm according to the new motor using only the updated nameplate parameters.
Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.

Generate Motor Control Models for Selected Algorithm and Hardware
Use Motor Control Blockset™ to generate a Simulink® model that is configured for a specific hardware and motor control technique.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2023b