ss
State-space model
Description
Use ss to create real-valued or complex-valued state-space
models, or to convert dynamic system models to
state-space model form.
A state-space model is a mathematical representation of a physical system as a set of
input, output, and state variables related by first-order differential equations. The state
variables define the values of the output variables. The ss model object
can represent SISO or MIMO state-space models in continuous time or discrete time.
In continuous-time, a state-space model is of the following form:
Here, x, u and y
represent the states, inputs and outputs respectively, while A,
B, C and D are the state-space
matrices. In discrete time, a state-space model takes the form:
The ss object represents a continuous-time or discrete-time
state-space model in MATLAB® storing A, B, C and
D along with other information such as sample time, I/O names, delays,
and offsets.
You can create a state-space model object by either specifying the state, input and output
matrices directly, or by converting a model of another type (such as a transfer function model
tf) to state-space form. For more information, see State-Space Models. You
can use an ss model object to:
Perform linear analysis
Represent a linear time-invariant (LTI) model to perform control design
Combine with other LTI models to represent a more complex system
Creation
Syntax
Description
sys = ss(A,B,C,D)
For instance, consider a plant with Nx states,
Ny outputs, and Nu inputs. The state-space
matrices are:
Ais anNx-by-Nxreal- or complex-valued matrix.Bis anNx-by-Nureal- or complex-valued matrix.Cis anNy-by-Nxreal- or complex-valued matrix.Dis anNy-by-Nureal- or complex-valued matrix.
sys = ss(___,PropertyName=Value)
sys = ss(ltiSys,component)ss object form the measured component, the noise
component or both of specified component of an identified linear
time-invariant (LTI) model ltiSys. Use this syntax only when
ltiSys is an identified (LTI) model such as an idtf (System Identification Toolbox), idss (System Identification Toolbox), idproc (System Identification Toolbox), idpoly (System Identification Toolbox) or idgrey (System Identification Toolbox) object.
sys = ss(ssSys,'minimal')minreal(ss(sys)) where
matrix A has the smallest possible dimension.
Conversion to state-space form is not uniquely defined in the SISO case. It is also not guaranteed to produce a minimal realization in the MIMO case. For more information, see Recommended Working Representation.
sys = ss(ssSys,'explicit')ssSys. ss returns an
error if ssSys is improper. For more information on explicit
state-space realization, see State-Space Models.
Input Arguments
Output Arguments
Properties
Object Functions
The following lists contain a representative subset of the functions you can use with
ss model objects. In general, any function applicable to Dynamic System Models is
applicable to an ss object.
Examples
Create the SISO state-space model defined by the following state-space matrices:
Specify the A, B, C and D matrices, and create the state-space model.
A = [-1.5,-2;1,0]; B = [0.5;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2
x1 -1.5 -2
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
Create a state-space model with a sample time of 0.25 seconds and the following state-space matrices:
Specify the state-space matrices.
A = [0 1;-5 -2]; B = [0;3]; C = [0 1]; D = 0;
Specify the sample time.
Ts = 0.25;
Create the state-space model.
sys = ss(A,B,C,D,Ts);
For this example, consider a cube rotating about its corner with inertia tensor J and a damping force F of 0.2 magnitude. The input to the system is the driving torque while the angular velocities are the outputs. The state-space matrices for the cube are:
Specify the A, B, C and D matrices, and create the continuous-time state-space model.
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -J\F; B = inv(J); C = eye(3); D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2 x3
x1 -0.04545 -0.02727 -0.02727
x2 -0.02727 -0.04545 -0.02727
x3 -0.02727 -0.02727 -0.04545
B =
u1 u2 u3
x1 0.2273 0.1364 0.1364
x2 0.1364 0.2273 0.1364
x3 0.1364 0.1364 0.2273
C =
x1 x2 x3
y1 1 0 0
y2 0 1 0
y3 0 0 1
D =
u1 u2 u3
y1 0 0 0
y2 0 0 0
y3 0 0 0
Continuous-time state-space model.
Model Properties
sys is MIMO since the system contains 3 inputs and 3 outputs observed from matrices C and D. For more information on MIMO state-space models, see MIMO State-Space Models.
Create a state-space model using the following discrete-time, multi-input, multi-output state matrices with sample time ts = 0.2 seconds:
Specify the state-space matrices and create the discrete-time MIMO state-space model.
A = [-7,0;0,-10]; B = [5,0;0,2]; C = [1,-4;-4,0.5]; D = [0,-2;2,0]; ts = 0.2; sys = ss(A,B,C,D,ts)
sys =
A =
x1 x2
x1 -7 0
x2 0 -10
B =
u1 u2
x1 5 0
x2 0 2
C =
x1 x2
y1 1 -4
y2 -4 0.5
D =
u1 u2
y1 0 -2
y2 2 0
Sample time: 0.2 seconds
Discrete-time state-space model.
Model Properties
Create state-space matrices and specify sample time.
A = [-0.2516 -0.1684;2.784 0.3549]; B = [0;3]; C = [0 1]; D = 0; Ts = 0.05;
Create the state-space model, specifying the state and input names using name-value pairs.
sys = ss(A,B,C,D,Ts,'StateName',{'Position' 'Velocity'},... 'InputName','Force');
The number of state and input names must be consistent with the dimensions of A, B, C, and D.
Naming the inputs and outputs can be useful when dealing with response plots for MIMO systems.
step(sys)
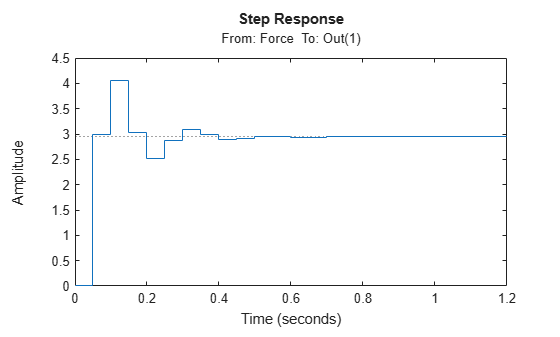
Notice the input name Force in the title of the step response plot.
For this example, create a state-space model with the same time and input unit properties inherited from another state-space model. Consider the following state-space models:
First, create a state-space model sys1 with the TimeUnit and InputUnit property set to 'minutes'.
A1 = [-1.5,-2;1,0]; B1 = [0.5;0]; C1 = [0,1]; D1 = 5; sys1 = ss(A1,B1,C1,D1,'TimeUnit','minutes','InputUnit','minutes');
Verify that the time and input unit properties of sys1 are set to 'minutes'.
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Create the second state-space model with properties inherited from sys1.
A2 = [7,-1;0,2]; B2 = [0.85;2]; C2 = [10,14]; D2 = 2; sys2 = ss(A2,B2,C2,D2,sys1);
Verify that the time and input units of sys2 have been inherited from sys1.
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
In this example, you will create a static gain MIMO state-space model.
Consider the following two-input, two-output static gain matrix:
Specify the gain matrix and create the static gain state-space model.
D = [2,4;3,5]; sys1 = ss(D)
sys1 =
D =
u1 u2
y1 2 4
y2 3 5
Static gain.
Model Properties
Compute the state-space model of the following transfer function:
Create the transfer function model.
H = [tf([1 1],[1 3 3 2]) ; tf([1 0 3],[1 1 1])];
Convert this model to a state-space model.
sys = ss(H);
Examine the size of the state-space model.
size(sys)
State-space model with 2 outputs, 1 inputs, and 5 states.
The number of states is equal to the cumulative order of the SISO entries in H(s).
To obtain a minimal realization of H(s), enter
sys = ss(H,'minimal');
size(sys)State-space model with 2 outputs, 1 inputs, and 3 states.
The resulting model has an order of three, which is the minimum number of states needed to represent H(s). To see this number of states, refactor H(s) as the product of a first-order system and a second-order system.
For this example, extract the measured and noise components of an identified polynomial model into two separate state-space models.
Load the Box-Jenkins polynomial model ltiSys in identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys is an identified discrete-time model of the form: , where represents the measured component and the noise component.
Extract the measured and noise components as state-space models.
sysMeas = ss(ltiSys,'measured') sysMeas =
A =
x1 x2
x1 1.575 -0.6115
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 -0.2851 0.3916
D =
u1
y1 0
Input delays (sampling periods): 2
Sample time: 0.04 seconds
Discrete-time state-space model.
Model Properties
sysNoise = ss(ltiSys,'noise')sysNoise =
A =
x1 x2 x3
x1 1.026 -0.26 0.3899
x2 1 0 0
x3 0 0.5 0
B =
v@y1
x1 0.25
x2 0
x3 0
C =
x1 x2 x3
y1 0.319 -0.04738 0.07106
D =
v@y1
y1 0.04556
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time state-space model.
Model Properties
The measured component can serve as a plant model, while the noise component can be used as a disturbance model for control system design.
Create a descriptor state-space model (E ≠ I).
a = [2 -4; 4 2]; b = [-1; 0.5]; c = [-0.5, -2]; d = [-1]; e = [1 0; -3 0.5]; sysd = dss(a,b,c,d,e);
Compute an explicit realization of the system (E = I).
syse = ss(sysd,'explicit')syse =
A =
x1 x2
x1 2 -4
x2 20 -20
B =
u1
x1 -1
x2 -5
C =
x1 x2
y1 -0.5 -2
D =
u1
y1 -1
Continuous-time state-space model.
Model Properties
Confirm that the descriptor and explicit realizations have equivalent dynamics.
bodeplot(sysd,syse,'g--')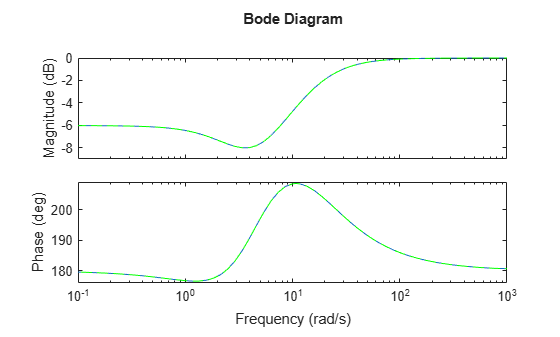
This example shows how to create a state-space genss model having both fixed and tunable parameters.
where a and b are tunable parameters, whose initial values are -1 and 3, respectively.
Create the tunable parameters using realp.
a = realp('a',-1); b = realp('b',3);
Define a generalized matrix using algebraic expressions of a and b.
A = [1 a+b;0 a*b];
A is a generalized matrix whose Blocks property contains a and b. The initial value of A is [1 2;0 -3], from the initial values of a and b.
Create the fixed-value state-space matrices.
B = [-3.0;1.5]; C = [0.3 0]; D = 0;
Use ss to create the state-space model.
sys = ss(A,B,C,D)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 2 states, and the following blocks: a: Scalar parameter, 2 occurrences. b: Scalar parameter, 2 occurrences. Model Properties Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
sys is a generalized LTI model (genss) with tunable parameters a and b.
For this example, consider a SISO state-space model defined by the following state-space matrices:
Considering an input delay of 0.5 seconds and an output delay of 2.5 seconds, create a state-space model object to represent the A, B, C and D matrices.
A = [-1.5,-2;1,0]; B = [0.5;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D,'InputDelay',0.5,'OutputDelay',2.5)
sys =
A =
x1 x2
x1 -1.5 -2
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Input delays (seconds): 0.5
Output delays (seconds): 2.5
Continuous-time state-space model.
Model Properties
You can also use the get command to display all the properties of a MATLAB object.
get(sys)
A: [2×2 double]
B: [2×1 double]
C: [0 1]
D: 0
E: []
Offsets: []
Scaled: 0
StateName: {2×1 cell}
StatePath: {2×1 cell}
StateUnit: {2×1 cell}
InternalDelay: [0×1 double]
InputDelay: 0.5000
OutputDelay: 2.5000
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: ''
Ts: 0
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
For more information on specifying time delay for an LTI model, see Specifying Time Delays.
For this example, consider a state-space System object™ that represents the following state matrices:
Create a state-space object sys using the ss command.
A = [-1.2,-1.6,0;1,0,0;0,1,0]; B = [1;0;0]; C = [0,0.5,1.3]; D = 0; sys = ss(A,B,C,D);
Next, compute the closed-loop state-space model for a unit negative gain and find the poles of the closed-loop state-space System object sysFeedback.
sysFeedback = feedback(sys,1); P = pole(sysFeedback)
P = 3×1 complex
-0.2305 + 1.3062i
-0.2305 - 1.3062i
-0.7389 + 0.0000i
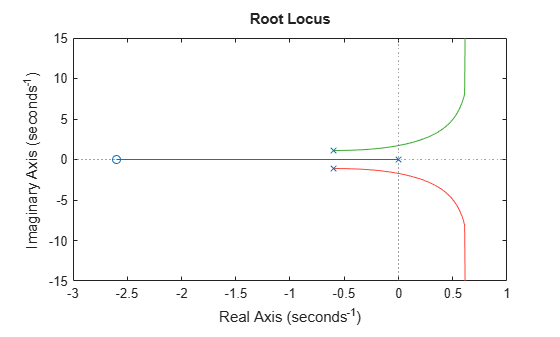
The feedback loop for unit gain is stable since all poles have negative real parts. Checking the closed-loop poles provides a binary assessment of stability. In practice, it is more useful to know how robust (or fragile) stability is. One indication of robustness is how much the loop gain can change before stability is lost. You can use the root locus plot to estimate the range of k values for which the loop is stable.
rlocus(sys)
Changes in the loop gain are only one aspect of robust stability. In general, imperfect plant modeling means that both gain and phase are not known exactly. Since modeling errors have the most detrimental effect near the gain crossover frequency (frequency where open-loop gain is 0dB), it also matters how much phase variation can be tolerated at this frequency.
You can display the gain and phase margins on a Bode plot as follows.
bode(sys)
grid
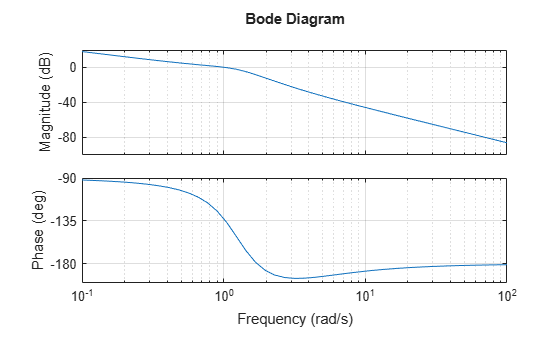
For a more detailed example, see Assessing Gain and Phase Margins.
For this example, design a 2-DOF PID controller with a target bandwidth of 0.75 rad/s for a system represented by the following matrices:
Create a state-space object sys using the ss command.
A = [-0.5,-0.1;1,0]; B = [1;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2
x1 -0.5 -0.1
x2 1 0
B =
u1
x1 1
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
Using the target bandwidth, use pidtune to generate a 2-DOF controller.
wc = 0.75;
C2 = pidtune(sys,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 0.513, Ki = 0.0975, Kd = 0.577, b = 0.344, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
Using the type 'PID2' causes pidtune to generate a 2-DOF controller, represented as a pid2 object. The display confirms this result. The display also shows that pidtune tunes all controller coefficients, including the setpoint weights b and c, to balance performance and robustness.
For interactive PID tuning in the Live Editor, see the Tune PID Controller Live Editor task. This task lets you interactively design a PID controller and automatically generates MATLAB code for your live script.
For interactive PID tuning in a standalone app, use PID Tuner. See PID Controller Design for Fast Reference Tracking for an example of designing a controller using the app.
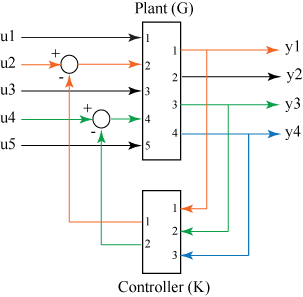
Consider a state-space plant G with five inputs and four outputs and a state-space feedback controller K with three inputs and two outputs. The outputs 1, 3, and 4 of the plant G must be connected the controller K inputs, and the controller outputs to inputs 4 and 2 of the plant.
For this example, consider two continuous-time state-space models for both G and K represented by the following set of matrices:
AG = [-3,0.4,0.3;-0.5,-2.8,-0.8;0.2,0.8,-3]; BG = [0.4,0,0.3,0.2,0;-0.2,-1,0.1,-0.9,-0.5;0.6,0.9,0.5,0.2,0]; CG = [0,-0.1,-1;0,-0.2,1.6;-0.7,1.5,1.2;-1.4,-0.2,0]; DG = [0,0,0,0,-1;0,0.4,-0.7,0,0.9;0,0.3,0,0,0;0.2,0,0,0,0]; sysG = ss(AG,BG,CG,DG)
sysG =
A =
x1 x2 x3
x1 -3 0.4 0.3
x2 -0.5 -2.8 -0.8
x3 0.2 0.8 -3
B =
u1 u2 u3 u4 u5
x1 0.4 0 0.3 0.2 0
x2 -0.2 -1 0.1 -0.9 -0.5
x3 0.6 0.9 0.5 0.2 0
C =
x1 x2 x3
y1 0 -0.1 -1
y2 0 -0.2 1.6
y3 -0.7 1.5 1.2
y4 -1.4 -0.2 0
D =
u1 u2 u3 u4 u5
y1 0 0 0 0 -1
y2 0 0.4 -0.7 0 0.9
y3 0 0.3 0 0 0
y4 0.2 0 0 0 0
Continuous-time state-space model.
Model Properties
AK = [-0.2,2.1,0.7;-2.2,-0.1,-2.2;-0.4,2.3,-0.2]; BK = [-0.1,-2.1,-0.3;-0.1,0,0.6;1,0,0.8]; CK = [-1,0,0;-0.4,-0.2,0.3]; DK = [0,0,0;0,0,-1.2]; sysK = ss(AK,BK,CK,DK)
sysK =
A =
x1 x2 x3
x1 -0.2 2.1 0.7
x2 -2.2 -0.1 -2.2
x3 -0.4 2.3 -0.2
B =
u1 u2 u3
x1 -0.1 -2.1 -0.3
x2 -0.1 0 0.6
x3 1 0 0.8
C =
x1 x2 x3
y1 -1 0 0
y2 -0.4 -0.2 0.3
D =
u1 u2 u3
y1 0 0 0
y2 0 0 -1.2
Continuous-time state-space model.
Model Properties
Define the feedout and feedin vectors based on the inputs and outputs to be connected in a feedback loop.
feedin = [4 2]; feedout = [1 3 4]; sys = feedback(sysG,sysK,feedin,feedout,-1)
sys =
A =
x1 x2 x3 x4 x5 x6
x1 -3 0.4 0.3 0.2 0 0
x2 1.18 -2.56 -0.8 -1.3 -0.2 0.3
x3 -1.312 0.584 -3 0.56 0.18 -0.27
x4 2.948 -2.929 -2.42 -0.452 1.974 0.889
x5 -0.84 -0.11 0.1 -2.2 -0.1 -2.2
x6 -1.12 -0.26 -1 -0.4 2.3 -0.2
B =
u1 u2 u3 u4 u5
x1 0.4 0 0.3 0.2 0
x2 -0.44 -1 0.1 -0.9 -0.5
x3 0.816 0.9 0.5 0.2 0
x4 -0.2112 -0.63 0 0 0.1
x5 0.12 0 0 0 0.1
x6 0.16 0 0 0 -1
C =
x1 x2 x3 x4 x5 x6
y1 0 -0.1 -1 0 0 0
y2 -0.672 -0.296 1.6 0.16 0.08 -0.12
y3 -1.204 1.428 1.2 0.12 0.06 -0.09
y4 -1.4 -0.2 0 0 0 0
D =
u1 u2 u3 u4 u5
y1 0 0 0 0 -1
y2 0.096 0.4 -0.7 0 0.9
y3 0.072 0.3 0 0 0
y4 0.2 0 0 0 0
Continuous-time state-space model.
Model Properties
size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys is the resultant closed loop state-space model obtained by connecting the specified inputs and outputs of G and K.
Since R2024a
This example shows how to linearize a Simulink® model and store the linearization offsets in the Offsets property of the ss model object.
Open the Simulink model.
mdl = 'watertankNLModel';
open_system(mdl)Specify the initial condition for water height.
h0 = 10;
Specify model linear analysis points.
io(1) = linio('watertankNLModel/Step',1,'input'); io(2) = linio('watertankNLModel/H',1,'output');
Simulate the model and extract operating points at time snapshots.
tlin = [0 15 30]; op = findop(mdl,tlin);
Compute the linearization result along with offsets.
options = linearizeOptions('StoreOffsets',true);
[linsys,~,info] = linearize(mdl,io,op,options);The function returns an array of state-space models linsys and their corresponding linearization offsets in info.Offsets.
The Offsets property of the ss model object requires a structure with fields u, y, x, and dx. You can use the info.Offsets output from linearize to set these offsets directly.
linsys.Offsets = info.Offsets; linsys.Offsets
ans=3×1 struct array with fields:
dx
x
u
y