pidtune
PID tuning algorithm for linear plant model
Syntax
Description
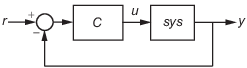
C = pidtune(sys,type)type for the plant
sys. If type specifies a one-degree-of-freedom
(1-DOF) PID controller, then the controller is designed for the unit feedback loop as
illustrated:
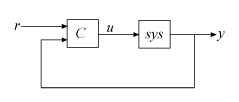
If type specifies a two-degree-of-freedom (2-DOF) PID controller,
then pidtune designs a 2-DOF controller as in the feedback loop of this
illustration:
pidtune tunes the parameters of the PID controller
C to balance performance (response time) and robustness (stability
margins).
C = pidtune(___,opts)pidtuneOptions to specify the option set opts.
Examples
This example shows how to design a PID controller for the plant given by:
As a first pass, create a model of the plant and design a simple PI controller for it.
sys = zpk([],[-1 -1 -1],1);
[C_pi,info] = pidtune(sys,'PI')C_pi =
1
Kp + Ki * ---
s
with Kp = 1.14, Ki = 0.454
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 0.5205
PhaseMargin: 60.0000
C_pi is a pid controller object that represents a PI controller. The fields of info show that the tuning algorithm chooses an open-loop crossover frequency of about 0.52 rad/s.
Examine the closed-loop step response (reference tracking) of the controlled system.
T_pi = feedback(C_pi*sys, 1); step(T_pi)
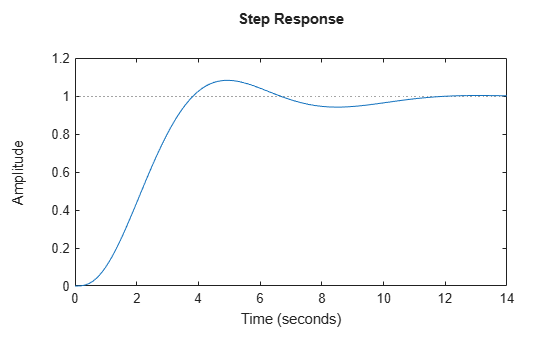
To improve the response time, you can set a higher target crossover frequency than the result that pidtune automatically selects, 0.52. Increase the crossover frequency to 1.0.
[C_pi_fast,info] = pidtune(sys,'PI',1.0)C_pi_fast =
1
Kp + Ki * ---
s
with Kp = 2.83, Ki = 0.0495
Continuous-time PI controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 43.9973
The new controller achieves the higher crossover frequency, but at the cost of a reduced phase margin.
Compare the closed-loop step response with the two controllers.
T_pi_fast = feedback(C_pi_fast*sys,1); step(T_pi,T_pi_fast) axis([0 30 0 1.4]) legend('PI','PI,fast')
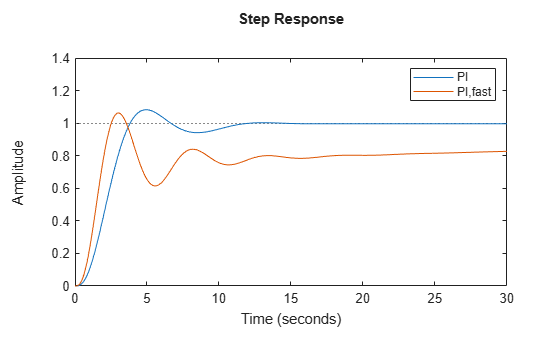
This reduction in performance results because the PI controller does not have enough degrees of freedom to achieve a good phase margin at a crossover frequency of 1.0 rad/s. Adding a derivative action improves the response.
Design a PIDF controller for Gc with the target crossover frequency of 1.0 rad/s.
[C_pidf_fast,info] = pidtune(sys,'PIDF',1.0)C_pidf_fast =
1 s
Kp + Ki * --- + Kd * --------
s Tf*s+1
with Kp = 2.72, Ki = 0.985, Kd = 1.72, Tf = 0.00875
Continuous-time PIDF controller in parallel form.
Model Properties
info = struct with fields:
Stable: 1
CrossoverFrequency: 1
PhaseMargin: 60.0000
The fields of info show that the derivative action in the controller allows the tuning algorithm to design a more aggressive controller that achieves the target crossover frequency with a good phase margin.
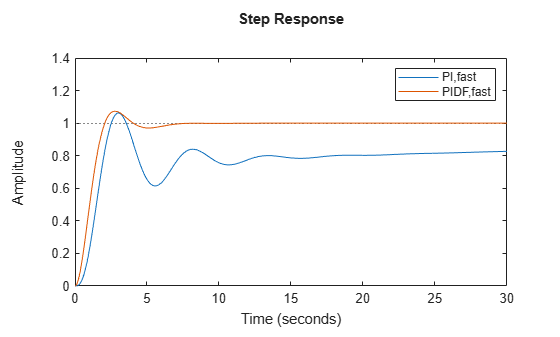
Compare the closed-loop step response and disturbance rejection for the fast PI and PIDF controllers.
T_pidf_fast = feedback(C_pidf_fast*sys,1); step(T_pi_fast, T_pidf_fast); axis([0 30 0 1.4]); legend('PI,fast','PIDF,fast');
You can compare the input (load) disturbance rejection of the controlled system with the fast PI and PIDF controllers. To do so, plot the response of the closed-loop transfer function from the plant input to the plant output.
S_pi_fast = feedback(sys,C_pi_fast); S_pidf_fast = feedback(sys,C_pidf_fast); step(S_pi_fast,S_pidf_fast); axis([0 50 0 0.4]); legend('PI,fast','PIDF,fast');

This plot shows that the PIDF controller also provides faster disturbance rejection.
Design a PID controller in standard form for the following plant.
To design a controller in standard form, use a standard-form controller as the C0 argument to pidtune.
sys = zpk([],[-1 -1 -1],1); C0 = pidstd(1,1,1); C = pidtune(sys,C0)
C =
1 1
Kp * (1 + ---- * --- + Td * s)
Ti s
with Kp = 2.18, Ti = 2.57, Td = 0.642
Continuous-time PID controller in standard form
Model Properties
Design a discrete-time PI controller using a specified method to discretize the integrator.
If your plant is in discrete time, pidtune automatically returns a discrete-time controller using the default Forward Euler integration method. To specify a different integration method, use pid or pidstd to create a discrete-time controller having the desired integration method.
sys = c2d(tf([1 1],[1 5 6]),0.1); C0 = pid(1,1,'Ts',0.1,'IFormula','BackwardEuler'); C = pidtune(sys,C0)
C =
Ts*z
Kp + Ki * ------
z-1
with Kp = -0.0658, Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time PI controller in parallel form.
Model Properties
Using C0 as an input causes pidtune to design a controller C of the same form, type, and discretization method as C0. The display shows that the integral term of C uses the Backward Euler integration method.
Specify a Trapezoidal integrator and compare the resulting controller.
C0_tr = pid(1,1,'Ts',0.1,'IFormula','Trapezoidal'); Ctr = pidtune(sys,C0_tr)
Ctr =
Ts*(z+1)
Ki * --------
2*(z-1)
with Ki = 1.32, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time I-only controller.
Model Properties
Design a 2-DOF PID Controller for the plant given by the transfer function:
Use a target bandwidth of 1.5 rad/s.
wc = 1.5;
G = tf(1,[1 0.5 0.1]);
C2 = pidtune(G,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 1.26, Ki = 0.255, Kd = 1.38, b = 0.665, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
Using the type 'PID2' causes pidtune to generate a 2-DOF controller, represented as a pid2 object. The display confirms this result. The display also shows that pidtune tunes all controller coefficients, including the setpoint weights b and c, to balance performance and robustness.
Input Arguments
Output Arguments
Tips
By default,
pidtunewith thetypeinput returns apidcontroller in parallel form. To design a controller in standard form, use apidstdcontroller as input argumentC0. For more information about parallel and standard controller forms, see thepidandpidstdreference pages.For interactive PID tuning in the Live Editor, see the Tune PID Controller Live Editor task. This task lets you interactively design a PID controller and automatically generates MATLAB® code for your live script.
Algorithms
For information about the MathWorks® PID tuning algorithm, see PID Tuning Algorithm.
Alternative Functionality
For interactive PID tuning in the Live Editor, see the Tune PID Controller Live Editor task. This task lets you interactively design a PID controller and automatically generates MATLAB code for your live script. For an example, see PID Controller Design in the Live Editor
For interactive PID tuning in a standalone app, use PID Tuner. See PID Controller Design for Fast Reference Tracking for an example of designing a controller using the app.
References
[1] Åström, Karl J., and Tore Hägglund. Advanced PID Control. Research Triangle Park, NC: ISA-The Instrumentation, Systems, and Automation Society, 2006.
Version History
Introduced in R2010b