As a small extension to problem: http://www.mathworks.com/matlabcentral/cody/problems/2100-distance-to-a-straight-line-2d-given-any-2-distinct-points-on-this-straight-line, imagine that Pe represents the attitude of a robotic end effector with 3 degrees of freedom (x,y and tht).
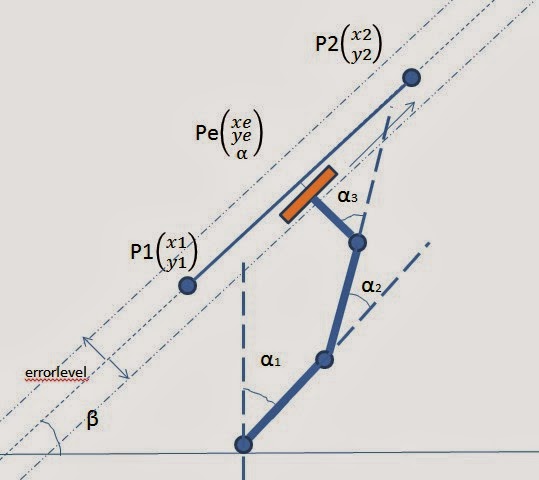
The end-effector (kind of orange) has to stay parallel to the straight line within a distance indicated by "errorlevel". The error levels for the distance are 1 cm (ridiculous accuracy) and .5 degrees for the end effector angle.
Write a function which returns true if the end-effector is "on track" and false if the position of the origin of the coordinate frame which is considered to be attached to the centre of the end effector, falls outside the area indicated by the dash-dotted line. Also return false if the end effector orientation is too far off from the direction of the straight line.
Solution Stats
Problem Comments
Solution Comments
Show commentsProblem Recent Solvers9
Suggested Problems
-
2251 Solvers
-
476 Solvers
-
Back to basics 8 - Matrix Diagonals
971 Solvers
-
Back to basics 24 - Symbolic variables
146 Solvers
-
Try 1.5.4: Celsius to Fahrenheit
873 Solvers
More from this Author10
Problem Tags
Community Treasure Hunt
Find the treasures in MATLAB Central and discover how the community can help you!
Start Hunting!