bandstop
Bandstop-filter signals
Syntax
Description
y = bandstop(x,wpass)x using a bandstop filter with a
stopband frequency range specified by the two-element vector
wpass and expressed in normalized units of
π rad/sample. bandstop uses a
minimum-order filter with a stopband attenuation of 60 dB and compensates for
the delay introduced by the filter. If x is a matrix, the
function filters each column independently.
y = bandstop(___,Name=Value)
[
also returns the y,d] = bandstop(___)digitalFilter object
d used to filter the input.
bandstop(___) with no output arguments plots
the input signal and overlays the filtered signal.
Examples
Create a signal sampled at 1 kHz for 1 second. The signal contains three tones, one at 50 Hz, another at 150 Hz, and a third at 250 Hz. The high-frequency and low-frequency tones both have twice the amplitude of the intermediate tone. The signal is embedded in Gaussian white noise of variance 1/100.
fs = 1e3; t = 0:1/fs:1; x = [2 1 2]*sin(2*pi*[50 150 250]'.*t) + randn(size(t))/10;
Bandstop-filter the signal to remove the medium-frequency tone. Specify passband frequencies of 100 Hz and 200 Hz. Display the original and filtered signals, and also their spectra.
bandstop(x,[100 200],fs)
![Figure contains 2 axes objects. Axes object 1 with title Bandstop Filtering (Fpass = [100 200] Hz), xlabel Time (s) contains 2 objects of type line. These objects represent Original, Filtered. Axes object 2 with xlabel Frequency (Hz), ylabel Power Spectrum (dB) contains 2 objects of type line. These objects represent Original, Filtered.](../../examples/signal/win64/BandstopFilteringOfTonesExample_01.png)
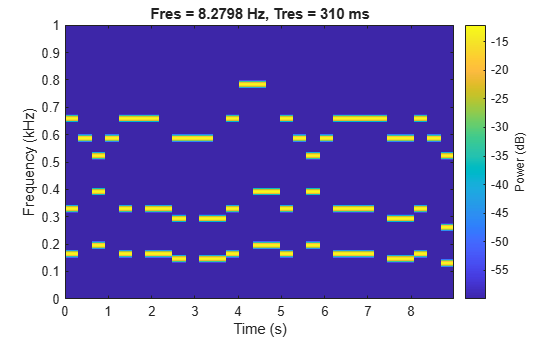
Implement a basic digital music synthesizer and use it to play a traditional song. Specify a sample rate of 2 kHz. Plot the spectrogram of the song.
fs = 2e3; t = 0:1/fs:0.3-1/fs; fq = [-Inf -9:2]/12; note = @(f,g) [1 1 1]*sin(2*pi*440*2.^[fq(g)-1 fq(g) fq(f)+1]'.*t); mel = [5 3 1 3 5 5 5 0 3 3 3 0 5 8 8 0 5 3 1 3 5 5 5 5 3 3 5 3 1]+1; acc = [5 0 8 0 5 0 5 5 3 0 3 3 5 0 8 8 5 0 8 0 5 5 5 0 3 3 5 0 1]+1; song = []; for kj = 1:length(mel) song = [song note(mel(kj),acc(kj)) zeros(1,0.01*fs)]; end song = song/(max(abs(song))+0.1); % To hear, type sound(song,fs) pspectrum(song,fs,"spectrogram",TimeResolution=0.31, ... OverlapPercent=0,MinThreshold=-60)
Bandstop-filter the signal to separate the middle register from the other two. Specify passband frequencies of 230 Hz and 450 Hz. Plot the original and filtered signals in the time and frequency domains.
bong = bandstop(song,[230 450],fs);
% To hear, type sound(bong,fs)
bandstop(song,[230 450],fs)![Figure contains 2 axes objects. Axes object 1 with title Bandstop Filtering (Fpass = [230 450] Hz), xlabel Time (s) contains 2 objects of type line. These objects represent Original, Filtered. Axes object 2 with xlabel Frequency (kHz), ylabel Power Spectrum (dB) contains 2 objects of type line. These objects represent Original, Filtered.](../../examples/signal/win64/BandstopFilteringOfMusicalSignalExample_02.png)
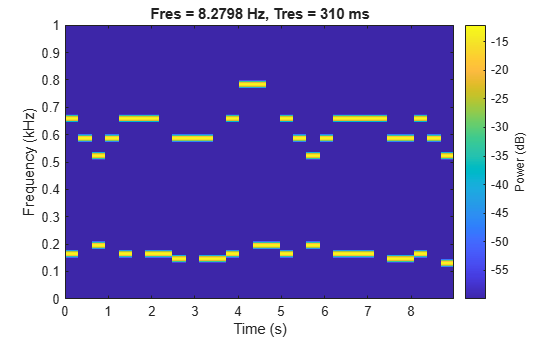
Plot the spectrogram of the song without the middle register.
figure pspectrum(bong,fs,"spectrogram",TimeResolution=0.31, ... OverlapPercent=0,MinThreshold=-60)
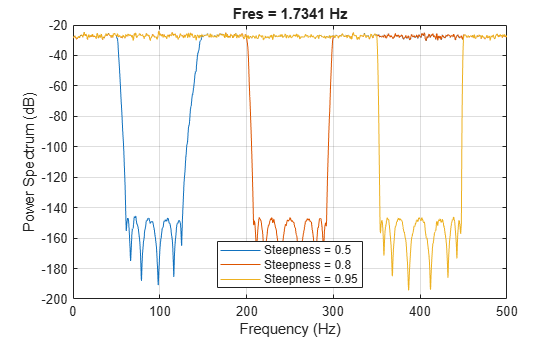
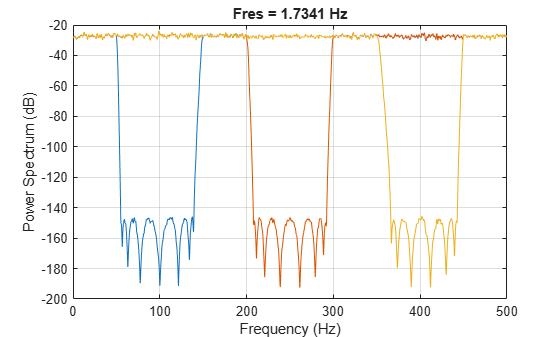
Filter white noise sampled at 1 kHz using an infinite impulse response bandstop filter with a stopband width of 100 Hz. Use different steepness values. Plot the spectra of the filtered signals.
fs = 1000; x = randn(20000,1); [y1,d1] = bandstop(x,[ 50 150],fs,ImpulseResponse="iir",Steepness=0.5); [y2,d2] = bandstop(x,[200 300],fs,ImpulseResponse="iir",Steepness=0.8); [y3,d3] = bandstop(x,[350 450],fs,ImpulseResponse="iir",Steepness=0.95); pspectrum([y1 y2 y3],fs) legend("Steepness = " + [0.5 0.8 0.95],Location="south")
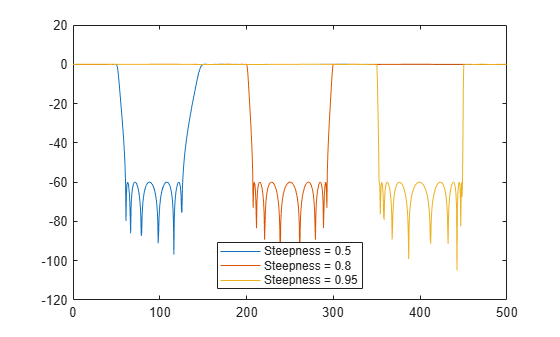
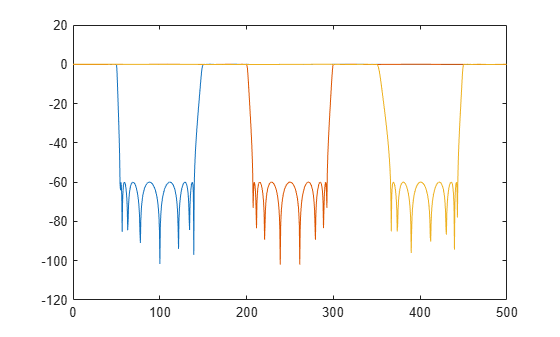
Compute and plot the frequency responses of the filters.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) legend("Steepness = " + [0.5 0.8 0.95],Location="south") ylim([-120 20])
Make the filters asymmetric by specifying different values of steepness at the lower and higher passband frequencies.
[y1,d1] = bandstop(x,[ 50 150],fs,ImpulseResponse="iir",Steepness=[0.5 0.8]); [y2,d2] = bandstop(x,[200 300],fs,ImpulseResponse="iir",Steepness=[0.5 0.8]); [y3,d3] = bandstop(x,[350 450],fs,ImpulseResponse="iir",Steepness=[0.5 0.8]); pspectrum([y1 y2 y3],fs)
Compute and plot the frequency responses of the filters.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) ylim([-120 20])
Input Arguments
Name-Value Arguments
Output Arguments
More About
Version History
Introduced in R2018a
See Also
Apps
Functions
bandpass|designfilt|filter|fir1|highpass|lowpass| Bandstop FIR | Bandstop IIR