collisionMesh
Create convex mesh collision geometry
Description
Use collisionMesh to create a collision geometry as a convex mesh
using a list of 3-D vertices relative to a frame of choice.
Creation
Description
MSH = collisionMesh( creates a
convex mesh collision geometry from the list of 3-D Vertices.
The vertices are specified relative to a frame of choice (collision geometry frame). By
default, the collision geometry frame collocates with the world frame.Vertices)
MSH = collisionMesh(___,Pose=
sets the pose)Pose property of the mesh to pose,
relative to the world frame.
Properties
Object Functions
checkCollision | Check if two geometries are in collision |
fitCollisionCapsule | Fit collision capsule around collision geometry |
show | Show collision geometry |
Examples
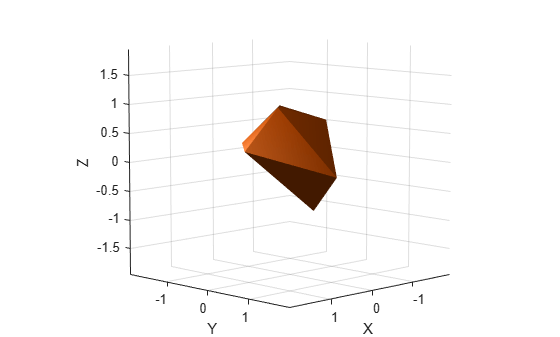
Create an array consisting of the coordinates of ten points randomly chosen on the unit sphere. For reproducibility, set the random seed to the default value.
rng default n = 10; pts = zeros(n,3); for k = 1:n ph = 2*pi*rand(1); th = pi*rand(1); pts(k,:) = [cos(th)*sin(ph) sin(th)*sin(ph) cos(ph)]; end
Create a convex mesh collision geometry from the array. Visualize the collision geometry.
m = collisionMesh(pts); show(m)
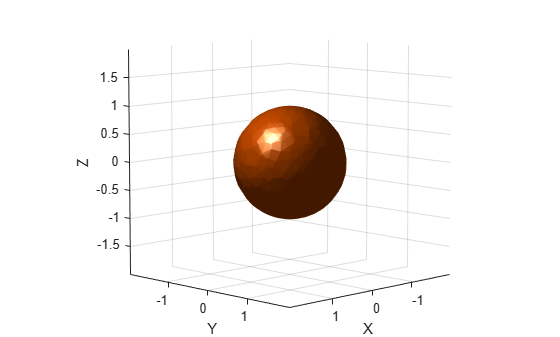
Create a second array similar to the first, but this time consisting of 1000 points randomly chosen on the unit sphere.
n = 1000; pts2 = zeros(n,3); for k = 1:n ph = 2*pi*rand(1); th = pi*rand(1); pts2(k,:) = [cos(th)*sin(ph) sin(th)*sin(ph) cos(ph)]; end
Create and visualize a mesh collision geometry from the array. Observe that choosing more points on the sphere results in a sphere-like mesh.
m2 = collisionMesh(pts2); show(m2)
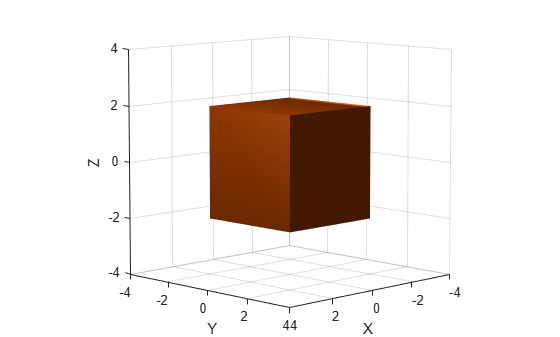
Create an array consisting of the coordinates of the eight corners of a cube. The cube is centered at the origin and has side length 4.
cubeCorners = [-2 -2 -2 ; -2 2 -2 ; 2 -2 -2 ; 2 2 -2 ;...
-2 -2 2 ; -2 2 2 ; 2 -2 2 ; 2 2 2]cubeCorners = 8×3
-2 -2 -2
-2 2 -2
2 -2 -2
2 2 -2
-2 -2 2
-2 2 2
2 -2 2
2 2 2
Append cubeCorners to pts2. Create and visualize the mesh collision geometry from the new array. Because the cube contains the sphere, the sphere points that are interior to the cube are disregarded when creating the geometry.
pts3 = [pts2;cubeCorners]; m3 = collisionMesh(pts3); show(m3)