imp2exp
Convert implicit linear relationship to explicit input-output relation
Description
B = imp2exp(A,yidx,uidx,'min')B with as many states as
A. Use this syntax when A(:,yidx) has a proper
inverse. This option is ignored for sparse models because it typically destroys sparsity.
For ss, genss and uss models,
B is returned in implicit form by default. Use isproper or ss(sys,'explicit') to extract an explicit model
if desired.
Examples
Consider two uncertain motor/generator constraints among 4 variables , namely . Find the uncertain 2-by-2 matrix B so that .
R = ureal('R',1,'Percentage',[-10 40]); K = ureal('K',2e-3,'Percentage',[-30 30]); A = [1 -R 0 -K;0 -K 1 0]; Yidx = [1 3]; Uidx = [4 2]; B = imp2exp(A,Yidx,Uidx)
Uncertain matrix with 2 rows and 2 columns. The uncertainty consists of the following blocks: K: Uncertain real, nominal = 0.002, variability = [-30,30]%, 2 occurrences R: Uncertain real, nominal = 1, variability = [-10,40]%, 1 occurrences Model Properties Type "B.NominalValue" to see the nominal value and "B.Uncertainty" to interact with the uncertain elements.
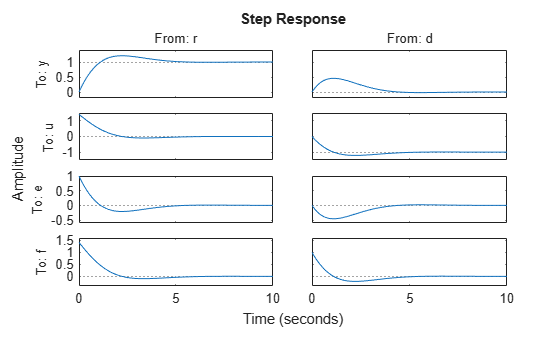
Consider a standard single-loop feedback connection of controller C and an uncertain plant P, described by the equations e = r-y; u = Ce; f = d+u; y = Pf.

P = tf([1],[1 0]); C = tf([2*.707*1 1^2],[1 0]); A = [1 -1 0 0 0 -1;0 -C 1 0 0 0;0 0 -1 -1 1 0;0 0 0 0 -P 1]; OutputIndex = [6;3;2;5]; % [y;u;e;f] InputIndex = [1;4]; % [r;d] Sys = imp2exp(A,OutputIndex,InputIndex); Sys.InputName = {'r';'d'}; Sys.OutputName = {'y';'u';'e';'f'};
pole(Sys)
ans = 16×1 complex
-0.7070 + 0.7072i
-0.7070 - 0.7072i
-0.7070 + 0.7072i
-0.7070 - 0.7072i
-0.7070 + 0.7072i
-0.7070 - 0.7072i
-0.7070 + 0.7072i
-0.7070 - 0.7072i
-0.7070 + 0.7072i
-0.7070 - 0.7072i
-0.7070 + 0.7072i
-0.7070 - 0.7072i
-0.7070 + 0.7072i
-0.7070 - 0.7072i
-0.7070 + 0.7072i
⋮
stepplot(Sys)
Input Arguments
Output Arguments
Version History
Introduced in R2011b