ufrd
Uncertain frequency response data model
Description
An uncertain frequency response data (ufrd) model consists of a
set of fixed frequency-response data points and one or more dependent uncertain elements. You
can use ufrd for robust stability and worst-case performance analysis.
Creation
There are several ways to construct a ufrd model, including:
Combine a numeric
frdmodel with uncertain state-space (uss) models or uncertain elements such asureal,ultidyn, orumarginusing model arithmetic. For example:fsys = frd(rand(100,1),logspace(-2,2,100)); k = ureal('k',1); D = ultidyn('Delta',[1 1]); ufrd_sys = k*fsys*(1+0.1*D)
Uncertain continuous-time FRD model with 1 outputs, 1 inputs, 100 frequency points. Delta: Uncertain 1x1 LTI, peak gain = 1, 1 occurrences k: Uncertain real, nominal = 1, variability = [-1,1], 1 occurrences Model Properties
ufrd_sysis aufrdmodel with uncertain elementskandD.Convert a
ussmodel toufrdby computing the response at a set of frequencies. For example:a = ureal('a',1,'range',[0.5 1.8]); usys = tf(a,[1 a]); freqs = logspace(-2,2,100); ufrd_sys = ufrd(usys,freqs)
Uncertain continuous-time FRD model with 1 outputs, 1 inputs, 100 frequency points. a: Uncertain real, nominal = 1, range = [0.5,1.8], 1 occurrences Model Properties Type "ufrd_sys.NominalValue" to see the nominal value and "usys.Uncertainty" to interact with the uncertain elements.
The resulting
ufrdmodel has the same uncertain elements as the originalussmodel.To specify the frequency units of the frequencies in
freqs, useufrd_sys = ufrd(M,freqs,frequnits)
The argument
frequnitscan take the same values as theFrequencyUnitproperty.More generally, convert any dynamic system model or static model
Mtoufrdas follows:ufrd_sys = ufrd(M,freqs)
If
Mcontains blocks that do not represent uncertainty (such as tunable parameters), those blocks are replaced by their current value. (To obtain a frequency-response model that preserves both tunable and uncertain blocks, usegenfrdinstead.)To specify the frequency units of the frequencies in
freqs, useufrd_sys = ufrd(M,freqs,frequnits). To further specify the time units whenMis a static model, useufrd_sys = ufrd(M,freqs,frequnits,timeunits). The argumentsfrequnitsandtimeunitscan take the same values as theFrequencyUnitandTimeUnitproperties, respectively.Use
frdto construct aufrdmodel from an uncertain matrix (umat) representing uncertain frequency response data. For example:a = ureal('delta',1,'percent',50); freq = logspace(-2,2,100); RespData = rand(1,1,100) * a; ufrd_sys = frd(RespData,freq,0.1)
Properties
Object Functions
Most functions that work on numeric frd models also work on
ufrd models. These include model interconnection functions such as
connect and feedback, and frequency-domain linear
analysis functions such as bode. Some functions that generate plots, such
as bodeplot, plot random samples of the uncertain model to give you a
sense of the distribution of uncertain dynamics. Analysis functions that return data, however,
typically operate on the nominal value of the system only. ufrd models do not
work with any time-domain analysis functions.
In addition, you can use functions such as robstab and
wcgain to perform robustness and worst-case analysis of uncertain
systems represented by ufrd models. You can also use tuning functions such as
systune for robust controller tuning.
The following lists contain a representative subset of the functions you can use with
ufrd models.
Examples
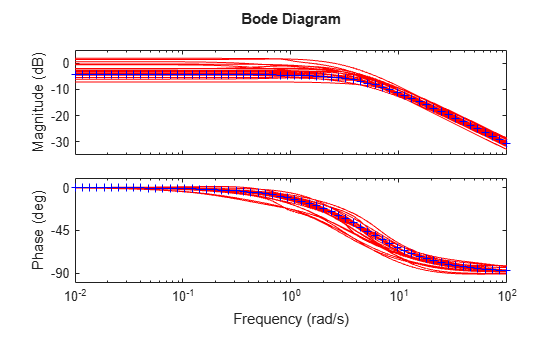
Compute the uncertain frequency response of an uncertain system with both parametric uncertainty (ureal) and uncertain gain and phase (umargin). Create the uncertain frequency response by building a uss model using uncertain dynamics, and then extracting its response at a specified set of frequencies.
p1 = ureal('p1',5,'Range',[2 6]); p2 = ureal('p2',3,'Plusminus',0.4); F = umargin('F',1.2); A = [-p1 0;p2 -p1]; B = [0;p2]; C = [1 1]; usys = uss(A,B,C,0)*F; freqs = logspace(-2,2,60); usysfrd = ufrd(usys,freqs);
Plot random samples and the nominal value of the uncertain frequency response.
rng(0); % for reproducibility bode(usysfrd,'r',usysfrd.NominalValue,'b+')
Version History
Introduced before R2006a