bodeplot
Plot Bode frequency response of dynamic system
Syntax
Description
The bodeplot function plots the Bode magnitude and phase of a
dynamic system
model. To customize the plot,
you can return an BodePlot object and modify it using dot notation. For more
information, see Customize Linear Analysis Plots at Command Line.
To obtain frequency response data, use the bode function.
bodeplot( plots the Bode magnitude and
phase of the dynamic system model sys)sys.
If sys is a multi-input, multi-output (MIMO) model, then the
bodeplot function creates a grid of Bode plots with each plot
displaying the frequency response of one input-output pair.
If sys is a model with complex coefficients, then in:
Log frequency scale, the plot shows two branches, one for positive frequencies and one for negative frequencies. The plot also shows arrows to indicate the direction of increasing frequency values for each branch.
Linear frequency scale, the plot shows a single branch with a symmetric frequency range centered at a frequency value of zero.
bodeplot(___, plots
the Bode frequency response with the plotting options specified in
plotoptions)plotoptions. Settings you specify in
plotoptions override the plotting preferences for the current
MATLAB® session. This syntax is useful when you want to write a script to generate
multiple plots that look the same regardless of the local preferences.
bodeplot(___, specifies
response properties using one or more name-value arguments. For example,
Name=Value)bodeplot(sys,LineWidth=1) sets the plot line width to 1. (since R2026a)
When plotting responses for multiple systems, the specified name-value arguments apply to all responses.
The following name-value arguments override values specified in other input arguments.
bodeplot( plots the
Bode response in the specified parent graphics container, such as a
parent,___)Figure or TiledChartLayout, and sets the
Parent property. Use this syntax when you want to create a plot in
a specified open figure or when creating apps in App Designer.
bp = bodeplot(___)
Examples
For this example, use the plot handle to change the frequency units to Hz and turn off the phase plot.
Generate a random state-space model with 5 states and create the Bode plot with chart object bp.
rng("default")
sys = rss(5);
bp = bodeplot(sys);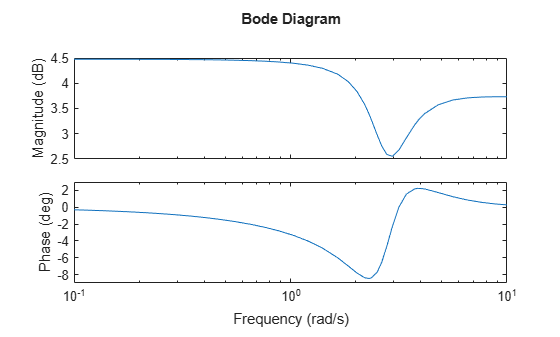
Change the units to Hz and suppress the phase plot by modifying the chart object.
bp.FrequencyUnit = "Hz"; bp.PhaseVisible = "off";
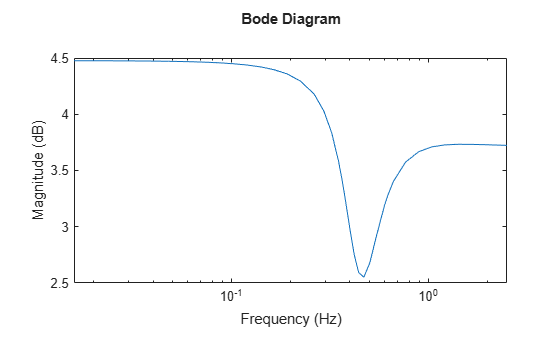
The Bode plot automatically updates when you modify the chart object.
For this example, create a Bode plot that uses 15-point red text for the title and sets a custom title. When you specify plot properties explicitly using bodeoptions, the specified properties override the MATLAB session preferences. Thus, the plot looks the same regardless of the preferences of the MATLAB session in which it is generated.
First, create a default options set using bodeoptions.
opts = bodeoptions;
Next, change the required properties of the options set opts. Because opt.Title is a structure, specify the properties of the plot title by specifying the fields and values of that structure.
opts.Title.FontSize = 15; opts.Title.Color = [1 0 0]; opts.Title.String = 'System Frequency Response'; opts.FreqUnits = 'Hz';
Now, create a Bode plot using the options set opts.
bodeplot(tf(1,[1,1]),opts);
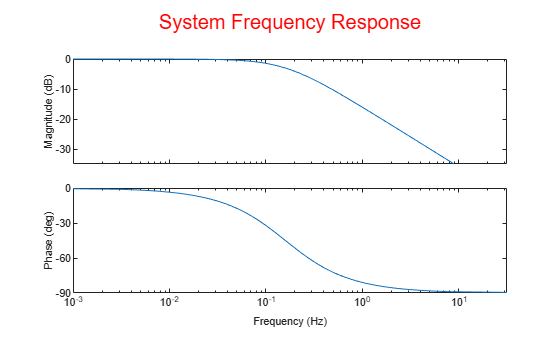
Because opts begins with a fixed set of options, the plot result is independent of the toolbox preferences of the MATLAB session.
For this example, create a Bode plot of the following continuous-time SISO dynamic system. Then, turn the grid on, rename the plot and change the frequency scale.
Create the transfer function sys.
sys = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Create the Bode plot. Specify plot properties by modifying the returned chart object.
bp = bodeplot(sys); bp.FrequencyScale = "linear"; title("Bode Plot of Transfer Function"); grid on
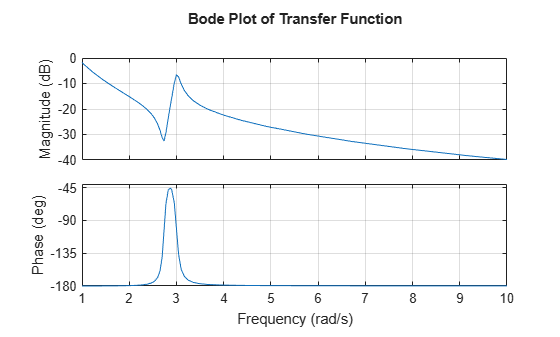
bodeplot automatically selects the plot range based on the system dynamics.
For this example, consider a MIMO state-space model with 3 inputs, 3 outputs and 3 states. Create a Bode plot with linear frequency scale, specify frequency units in Hz and turn the grid on.
Create the MIMO state-space model sys_mimo.
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -J\F; B = inv(J); C = eye(3); D = 0; sys_mimo = ss(A,B,C,D); size(sys_mimo)
State-space model with 3 outputs, 3 inputs, and 3 states.
Create a Bode plot and return the corresponding chart object.
bp = bodeplot(sys_mimo);
Customize the plot by updating properties of the chart object.
bp.FrequencyScale = "linear"; bp.FrequencyUnit = "Hz"; grid on
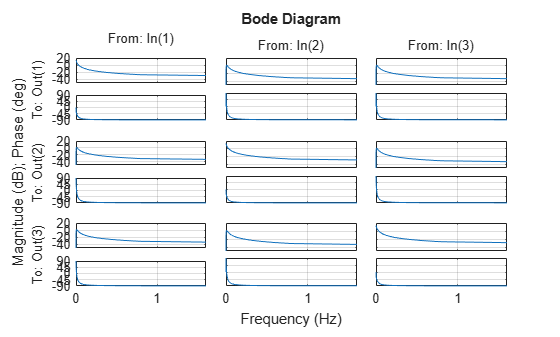
The Bode plot automatically updates when you modify the chart object properties. For MIMO models, bodeplot produces an array of Bode plots, each plot displaying the frequency response of one I/O pair.
For this example, match the phase of your system response such that the phase at 1 rad/sec is 150 degrees.
First, create a Bode plot of a transfer function system with chart object bp.
sys = tf(1,[1 1]); bp = bodeplot(sys);
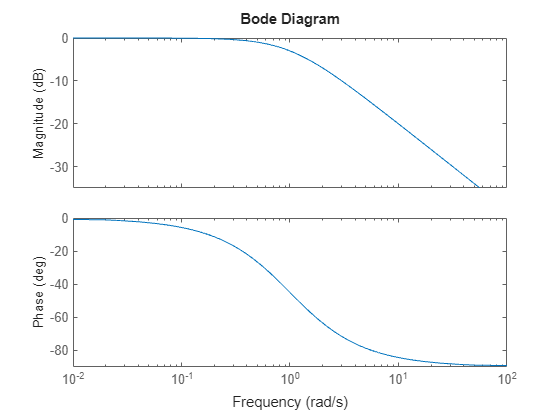
Enable phase matching and set the phase matching frequency and value.
bp.PhaseMatchingEnabled = "on";
bp.PhaseMatchingFrequency = 1;
bp.PhaseMatchingValue = 150;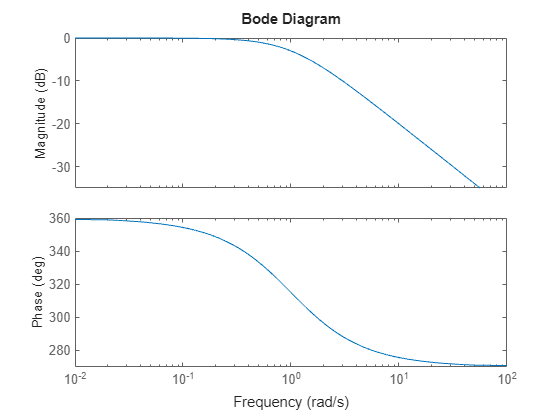
The first bode plot has a phase of -45 degrees at a frequency of 1 rad/s. Setting the phase matching options so that at 1 rad/s the phase is near 150 degrees yields the second Bode plot. Note that, however, the phase can only be -45 + N*360, where N is an integer. So the plot is set to the nearest allowable phase, namely 315 degrees (or ).
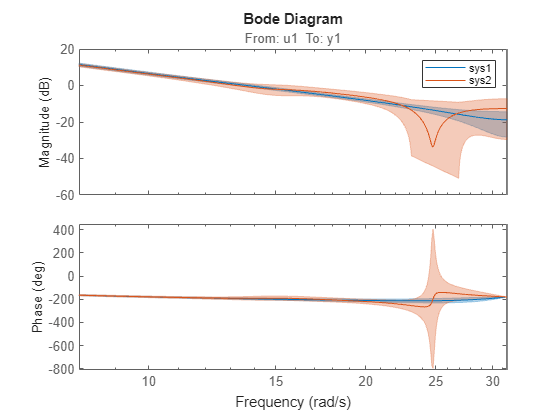
For this example, compare the frequency responses of two identified state-space models with 2 and 6 states along with their 2 confidence regions.
Load the identified state-space model data and estimate the two models using n4sid. Using n4sid requires a System Identification Toolbox™ license.
load iddata1
sys1 = n4sid(z1,2);
sys2 = n4sid(z1,6);Create a Bode plot of the two systems.
bodeplot(sys1,'r',sys2,'b'); legend('sys1','sys2');
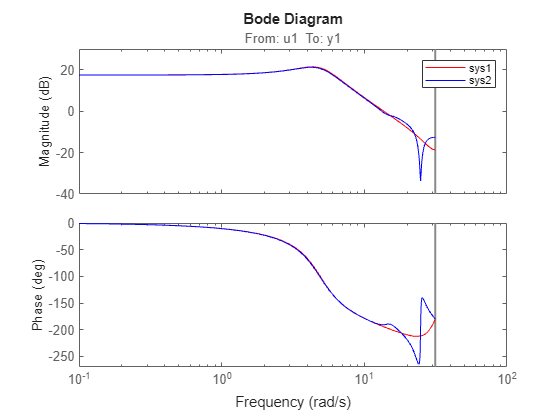
From the plot, observe that both models produce about 70% fit to data. However, sys2 shows higher uncertainty in its frequency response, especially close to the Nyquist frequency. Now, use linspace to create a vector of frequencies and plot the Bode response using the frequency vector w.
w = linspace(8,10*pi,256); bp = bodeplot(sys1,sys2,w); legend('sys1','sys2');
Enable phase matching, specify the standard deviation of the confidence region, and display the confidence region.
bp.PhaseMatchingEnabled = "on"; bp.Characteristics.ConfidenceRegion.NumberOfStandardDeviations = 2; bp.Characteristics.ConfidenceRegion.Visible = "on";
Alternatively, you can use the showconfidence command to display the confidence regions on the Bode plot.
showConfidence(bp)
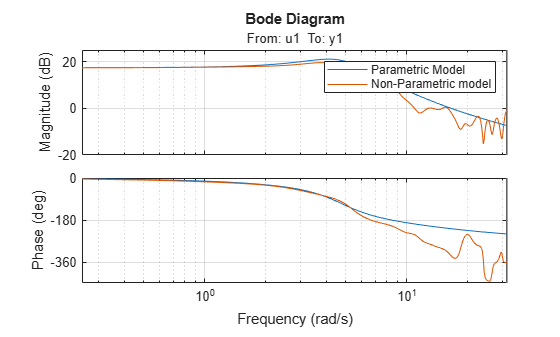
For this example, compare the frequency response of a parametric model, identified from input/output data, to a non-parametric model identified using the same data. Identify parametric and non-parametric models based on the data.
Load the data and create the parametric and non-parametric models using tfest and spa, respectively.
load iddata2 z2; w = linspace(0,10*pi,128); sys_np = spa(z2,[],w); sys_p = tfest(z2,2);
spa and tfest require System Identification Toolbox™ software. The model sys_np is a non-parametric identified model while, sys_p is a parametric identified model.
Create a Bode plot that includes both systems. Enable phase macthing for this plot.
bp = bodeplot(sys_p,sys_np,w); bp.PhaseMatchingEnabled = "on"; grid on legend('Parametric Model','Non-Parametric model');
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The software computes the frequency response as follows:
Compute the zero-pole-gain (
zpk) representation of the dynamic system.Evaluate the gain and phase of the frequency response based on the zero, pole, and gain data for each input/output channel of the system.
For continuous-time systems, the
bodeplotfunction evaluates the frequency response on the imaginary axis s = jω and considers only positive frequencies.For discrete-time systems, the
bodeplotfunction evaluates the frequency response on the unit circle. To facilitate interpretation, the command parameterizes the upper half of the unit circle as:where Ts is the sample time and ωN is the Nyquist frequency. The software then uses the equivalent continuous-time frequency ω as the x-axis variable. Because is periodic with period 2ωN, the
bodeplotfunction plots the response only up to the Nyquist frequency ωN. Ifsysis a discrete-time model with an unspecified sample time, thebodeplotfunction uses Ts = 1.
Version History
Introduced before R2006aSee Also
bode | bodeoptions | addResponse | showConfidence (System Identification Toolbox)