Motion Planning
Generate flight trajectories with constraints and cost optimization. Perform obstacle avoidance for UAV missions. Import trajectories into a 3D simulation environment.
Objects
Functions
Blocks
| Obstacle Avoidance | Compute obstacle-free direction using range sensor data and target position (Since R2021b) |
| Minimum Jerk Polynomial Trajectory | Generate minimum jerk polynomial trajectories through multiple waypoints (Since R2022a) |
| Minimum Snap Polynomial Trajectory | Generate minimum snap polynomial trajectories through multiple waypoints (Since R2022a) |
| Read UAV Trajectory | Generate translation and rotation samples from UAV trajectory for 3D simulation (Since R2024b) |
Topics
- Simulate UAV Mission in Urban Environment
Simulate a UAV mission in an urban environment using UAV scenario and OpenStreetMap® data of Manhattan, New York.
- Generate Random 3-D Occupancy Map for UAV Motion Planning
This example shows how to generate a random 3D occupancy map by automatically adding the desired number of obstacles of varying dimensions at random positions on the map.
- Simulate UAV Scenario Trajectory in Unreal Engine Environment
Design a flight trajectory in a UAV scenario, and simulate the trajectory in a 3D environment using Unreal Engine®.
- Design Real-World Trajectory in UAV Scenario and Visualize with Cesium
Design a real-world trajectory in a UAV scenario, and visualize the trajectory in a 3D environment using Cesium.
- Simulate Flight Plan in Real-World Location Using Cesium
Simulate a flight plan created with QGroundControl in a 3D environment using Cesium.
Featured Examples

UAV Obstacle Avoidance in Simulink
Simulate a waypoint following mission with obstacles using the 3D VFH+ algorithm to compute an obstacle-free path.

Optimally Survey and Customize Coverage of Region of Interest
Plan and customize a coverage path for a UAV to use to survey a geographical region.

Motion Planning with RRT for Fixed-Wing UAV
Plan the 3D motion of a fixed-wing UAV using the rapidly exploring random tree (RRT) algorithm, given a start and goal pose.
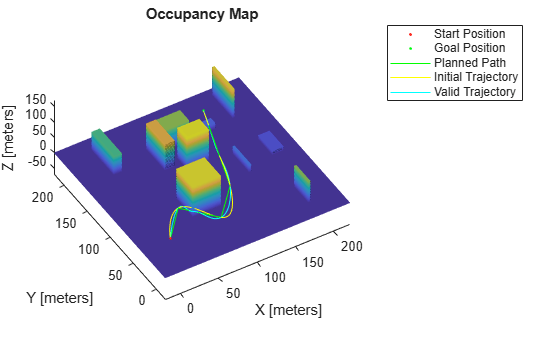
Plan Minimum Snap Trajectory for Quadrotor
Plan a 3D minimum snap trajectory for a multirotor UAV from a start to a goal pose by using the RRT* path planner.
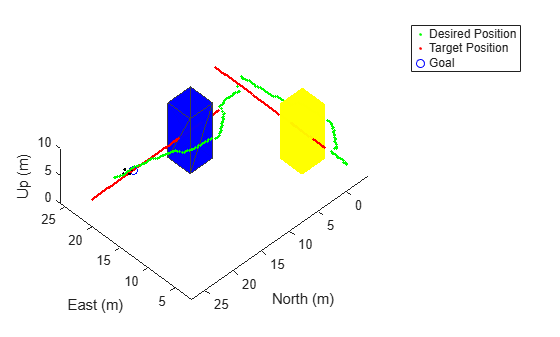
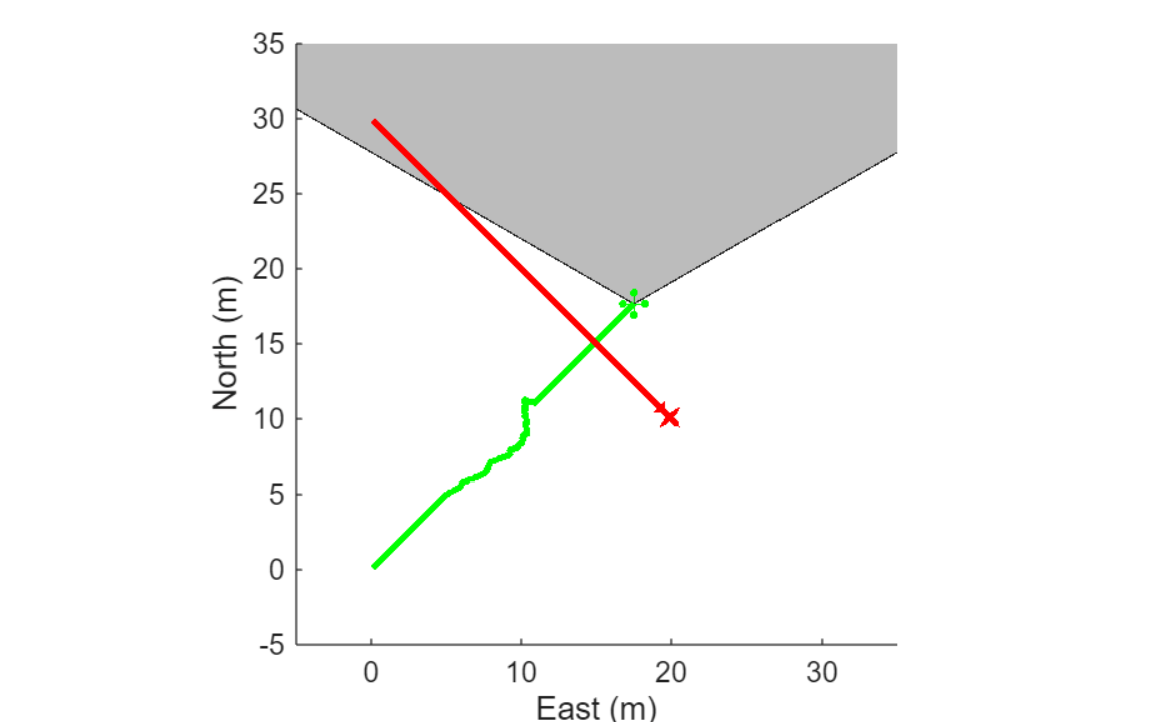
Tune 3D Vector Field Histogram Controller for Obstacle Avoidance
Tune the controllerVFH3D System object™ to navigate a multirotor UAV in an obstacle environment using a lidar sensor.

Onboard Computer Path Planning Interface for PX4 SITL Deployable on NVIDIA Jetson
Demonstrates enabling and interfacing onboard computer path planning with PX4® software-in-the-Loop (SITL).
Simulate UAV Using Radar Sensor to Avoid Dynamic Obstacle
Avoid collision with moving obstacles, based on the velocity obstacle algorithm by using radar detections.