Neighborhood Processing Subsystem
Libraries:
Simulink /
Matrix Operations
Description
The Neighborhood Processing Subsystem block is a Subsystem block preconfigured as a starting point for creating a subsystem that follows the neighborhood pattern. At each simulation time step, the subsystem iterates over elements of an input array. For each element, the subsystem processes a neighborhood of values surrounding that element. Use the subsystem for image processing. Certain image processing algorithms involve processing images in sections rather than processing the entire image at once.
Configuring Subsystem
The Neighborhood Processing Subsystem contains a Neighborhood block that acts as a control block for the subsystem. Specify the parameters of the Neighborhood block to configure the behavior of the subsystem.
The Neighborhood size parameter controls the dimensions of the
neighborhood. For elements near the edges of the input matrix, the neighborhood can extend
beyond the input matrix. The Padding option parameter controls how
the subsystem treats values from outside the input matrix. You can configure the subsystem
to pad these values with a constant or by reusing values from inside the matrix. If you use
the Constant padding option, use the Padding
constant parameter to set the constant value.
You can configure the Neighborhood Processing Subsystem block to process only certain elements of an input matrix. Use the Stride parameter to configure the Neighborhood Processing Subsystem block to skip a certain number of elements at each iteration. Use the Processing offset and Processing width parameters to define the top left and bottom right boundaries, respectively, of a region of interest (ROI) within the image. The Neighborhood Processing Subsystem block iterates over only that region.
The Output size parameter controls the size of the output matrix:
The
Samevalue configures the output matrix to be the same size as the ROI.The
Fullvalue produces a larger output matrix by calculating values for elements outside the ROI whose neighborhoods include at least one element from the ROI.The
Validvalue creates a smaller output matrix by calculating values for only the elements whose neighborhoods do not extend beyond the ROI. When you use this value, the Padding constant parameter is disabled.The
Customvalue enables the Padding size parameter, which you can use to specify a custom amount of padding. When you use this setting, the size of the output matrix depends on the values of the Neighborhood size, Padding size, and Stride parameters. The output size of each dimensionnis:where:
inputSizen.neighborhoodSizen, as you specify with elementnof the Neighborhood size parameter.paddingStartn, as you specify with element 2n-1 of the Padding size parameter.paddingEndn, as you specify with element 2nof the Padding size parameter.striden, as you specify with elementnof the Stride parameter.
Example
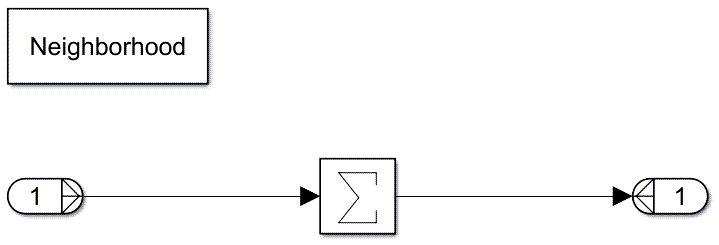
Consider this model.

In this example, the Neighborhood Processing Subsystem block takes a
5-by-5 matrix and outputs a matrix of the same dimensions by using the
Same output size option. The subsystem contains these
blocks.
Inside the Neighborhood Processing Subsystem block, the inport does not
receive the full 5-by-5 matrix. Instead, because the Neighborhood
size parameter value is [3 3], the inport receives a
smaller, 3-by-3 window of elements. The subsystem iterates over the elements of the input
matrix, passing the neighborhood of each element to the inport at each iteration.
The model uses the Constant padding option with a padding value of
0. For neighborhoods that extend beyond the input matrix, the subsystem
treats the external values as 0.
The outport of the Neighborhood Processing Subsystem block receives a
scalar which represents the derived value for the element at the center of the window. In
this case, a Sum of Elements block with the Sum over
parameter set to All dimensions produces a scalar for each
window, representing the sum of the values in that window.
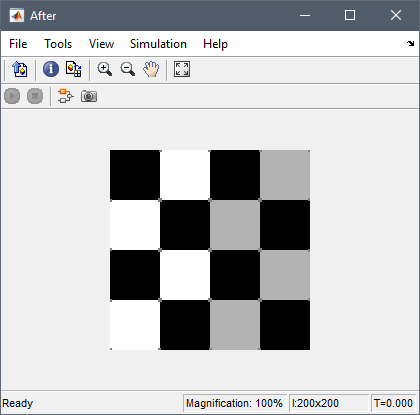
Run the model to populate the Display block.

Each value of the output matrix is the sum of the corresponding element and its eight
direct neighbors in the input matrix. The inner elements are surrounded by values of
1, and so have the value 9. The outer elements have
lower values because the selected padding method uses the value 0 for
elements outside the input matrix.
Examples
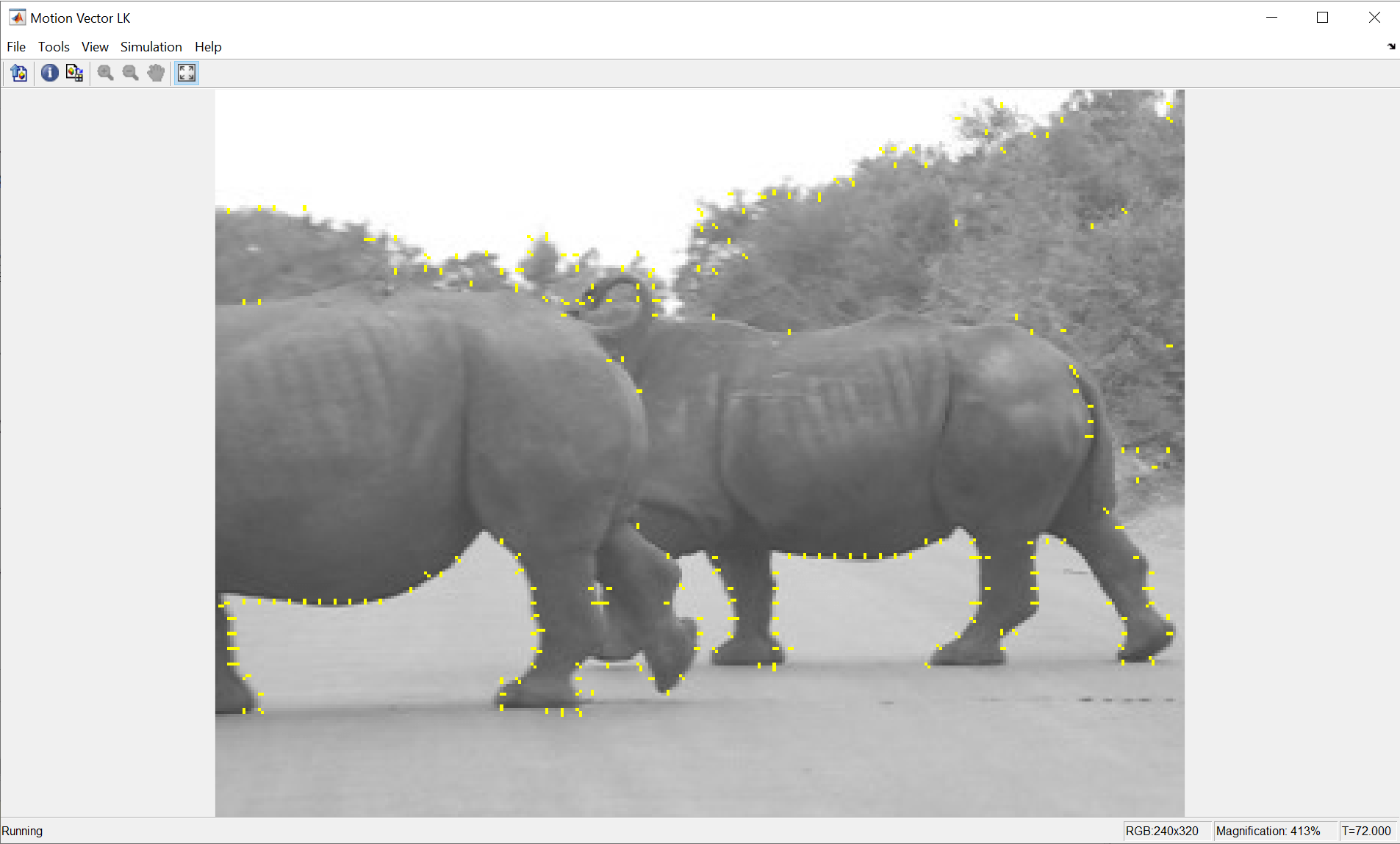
Calculate Optical Flow by Using Neighborhood Processing Subsystem Blocks
Use Neighborhood Processing Subsystem blocks to calculate the apparent motion of objects in a video.
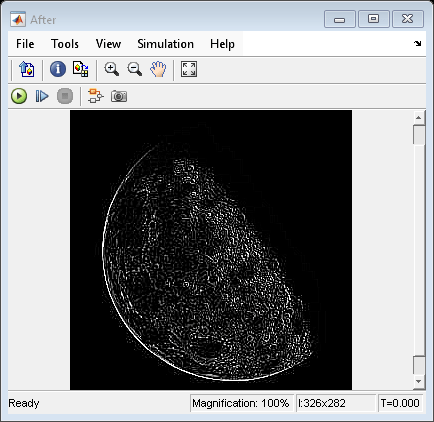
Perform Edge Detection by Using a Neighborhood Processing Subsystem Block
Use a Neighborhood Processing Subsystem block to detect edges in an image.
Perform Corner Detection by Using Neighborhood Processing Subsystem Blocks
Use Neighborhood Processing Subsystem blocks to detect corners in an image.
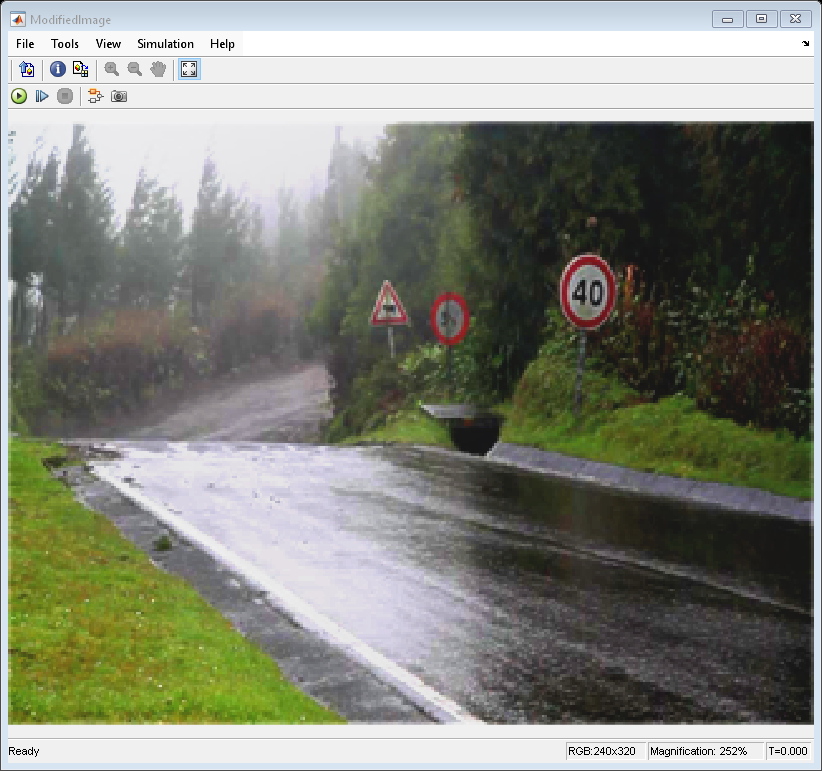
Perform Fog Rectification by Using Neighborhood Processing Subsystem Blocks
Use Neighborhood Processing Subsystem blocks to remove fog from an image.
Limitations
The Neighborhood Processing Subsystem block cannot contain Switch blocks when you use normal simulation mode. To use a Switch block inside a Neighborhood Processing Subsystem block, use the accelerator or rapid accelerator simulation mode. For a workaround in normal simulation mode, see the Tips section.
The Neighborhood Processing Subsystem block does not support row-major layout.
The Neighborhood Processing Subsystem block cannot contain blocks that have state.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Tips
To improve performance, consider setting the Measure function execution times (Embedded Coder) configuration parameter to
Coarse (referenced models and subsystems only)when you run software-in-the-loop (SIL) or processor-in-the-loop (PIL) profiling on a model that contains a Neighborhood Processing Subsystem block. Neighborhood Processing Subsystem blocks process large amounts of data, which can cause poor performance when you use theDetailed (all function call sites)option. For more information, see Create Execution-Time Profile for Generated Code (Embedded Coder).Switch blocks are useful in Neighborhood Processing Subsystem blocks for image processing tasks such as thresholding. Thresholding can convert an image to black and white by converting every pixel value to
255or0, depending on whether the input pixel value is greater than a given threshold value. For example, this Neighborhood Processing Subsystem block performs thresholding by using a Switch block with a threshold value of110.
To perform thresholding in normal simulation mode, consider using a Relational Operator block that uses the
>operator to recreate the Switch block behavior.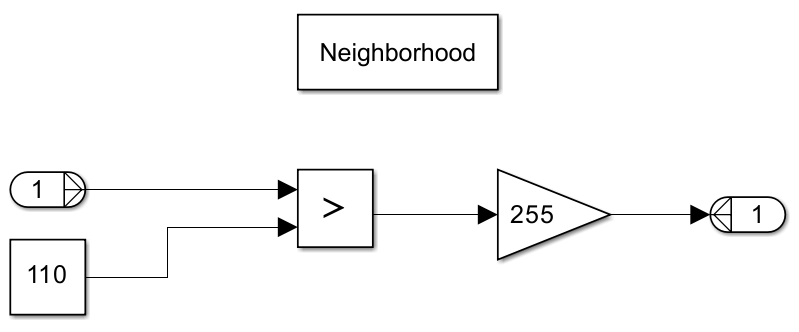
The Relational Operator block returns a value of
1if the input value is greater than the threshold and otherwise returns0. By sending this value to a Gain block with a value of255, the subsystem returns255or0.