dsphdl.ComplexToMagnitudeAngle
Magnitude and phase angle of complex signal
Description
The dsphdl.ComplexToMagnitudeAngle
System object™ computes the magnitude and phase angle of a complex signal. It provides
hardware-friendly control signals. The System object uses a pipelined coordinate rotation digital computer (CORDIC) algorithm to
achieve an HDL-optimized implementation.
To compute the magnitude and phase angle of a complex signal:
Create the
dsphdl.ComplexToMagnitudeAngleobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Note
You can also generate HDL code for this hardware-optimized algorithm, without creating a MATLAB® script, by using the DSP HDL IP Designer app. The app provides the same interface and configuration options as the System object.
Creation
Syntax
Description
magAngle = dsphdl.ComplexToMagnitudeAngledsphdl.ComplexToMagnitudeAngle
System object, magAngle, that computes the magnitude and phase angle
of a complex input signal.
magAngle = dsphdl.ComplexToMagnitudeAngle(PropertyName=Value)magAngle object using one or more name-value
arguments.
Example: magAngle =
dsphdl.ComplexToMagnitudeAngle(AngleFormat='Radians')
Properties
Usage
Syntax
Description
[
returns only the component magnitudes of mag,validOut]
= magAngle(X,validIn)X.
To use this syntax, set OutputFormat to
'Magnitude'.
Example: magAngle =
dsphdl.ComplextoMagnitudeAngle(OutputFormat='Magnitude');
[
returns only the component phase angles of angle,validOut]
= magAngle(X,validIn)X.
To use this syntax, set OutputFormat to
'Angle'.
Example: magAngle =
dsphdl.ComplextoMagnitudeAngle(OutputFormat='Angle');
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Use the dsphdl.ComplextoMagnitudeAngle object to compute the magnitude and phase angle of a complex signal. The object uses a CORDIC algorithm for an efficient hardware implementation.
Choose word lengths and create random complex input signal. Then, convert the input signal to fixed-point.
a = -4; b = 4; inputWL = 16; inputFL = 12; numSamples = 10; reData = ((b-a).*rand(numSamples,1)+a); imData = ((b-a).*rand(numSamples,1)+a); dataIn = (fi(reData+imData*1i,1,inputWL,inputFL)); figure plot(dataIn) title('Random Complex Input Data') xlabel('Real') ylabel('Imaginary')

Write a function that creates and calls the System object™. You can generate HDL from this function.
function [mag,angle,validOut] = Complex2MagAngle(yIn,validIn) %Complex2MagAngle % Converts one sample of complex data to magnitude and angle data. % yIn is a fixed-point complex number. % validIn is a logical scalar value. % You can generate HDL code from this function. persistent cma; if isempty(cma) cma = dsphdl.ComplexToMagnitudeAngle(AngleFormat='Radians'); end [mag,angle,validOut] = cma(yIn,validIn); end % Copyright 2021-2023 The MathWorks, Inc.
The number of CORDIC iterations determines the latency that the object takes to compute the answer for each input sample. The latency is NumIterations+4. In this example, NumIterationsSource is set to the default, 'Auto', so the object uses inputWL-1 iterations. The latency is inputWL+3.
latency = inputWL+3; mag = zeros(1,numSamples+latency); ang = zeros(1,numSamples+latency); validOut = false(1,numSamples+latency);
Call the function to convert each sample. After you apply all input samples, continue calling the function with invalid input to flush remaining output samples.
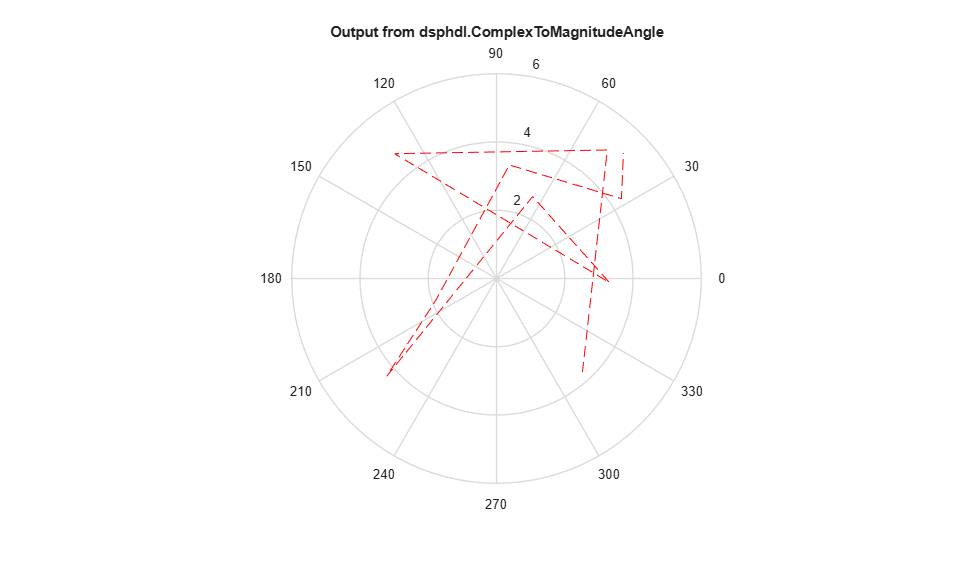
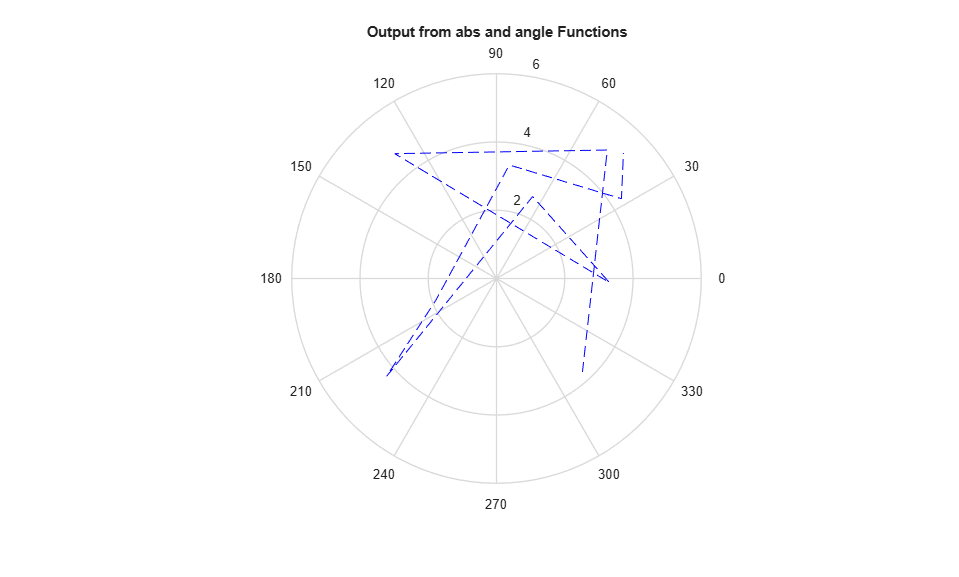
for ii = 1:1:numSamples [mag(ii),ang(ii),validOut] = Complex2MagAngle(dataIn(ii),true); end for ii = (numSamples+1):1:(numSamples+latency) [mag(ii),ang(ii),validOut(ii)] = Complex2MagAngle(fi(0+0*1i,1,inputWL,inputFL),false); end % Remove invalid output values mag = mag(validOut == 1); ang = ang(validOut == 1); figure polar(ang,mag,'--r') % Red is output from System object title('Output from dsphdl.ComplexToMagnitudeAngle') magD = abs(dataIn); angD = angle(dataIn); figure polar(angD,magD,'--b') % Blue is output from abs and angle functions title('Output from abs and angle Functions')
Algorithms
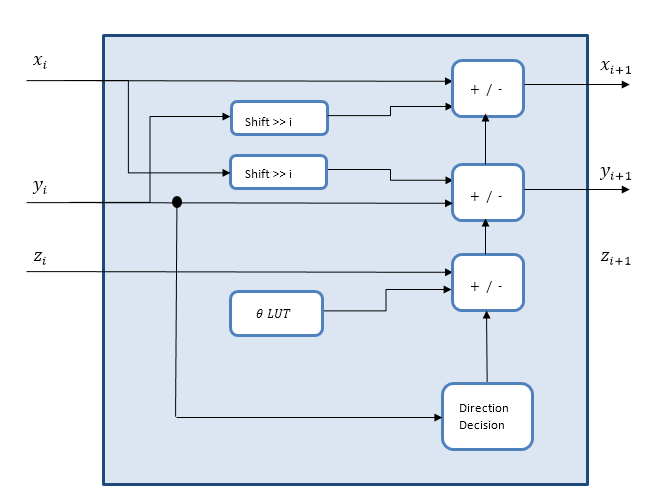
The object generates a pipelined HDL architecture to maximize throughput. Each CORDIC iteration is done in one pipeline stage. The gain multiplier, if enabled, is implemented with Canonical Signed Digit (CSD) logic.
If you use vector input, this object replicates this architecture in parallel for each element of the vector.

| Input Word Length | Output Magnitude Word Length |
|---|---|
| fixdt(0,WL,FL) | fixdt(0,WL+2,FL) |
| fixdt(1,WL,FL) | fixdt(1,WL+1,FL) |
| Input Word Length | Output Angle Word Length | |
|---|---|---|
| fixdt([ ],WL,FL) | Radians | fixdt(1,WL+3,WL) |
| Normalized | fixdt(1,WL+3,WL+2) | |
The CORDIC logic at each pipeline stage implements one iteration. For each pipeline stage, the shift and angle rotation are constants.
When you set OutputFormat to 'Magnitude', the
object does not generate HDL code for the angle accumulation and quadrant correction
logic.
This format normalizes the fixed-point radian angle values around the unit circle. This is a more efficient use of bits than a range of [0,2π] radians. Normalized angle format also enables wraparound at 0/2π without additional detect and correct logic.
For example, representing the angle with 3 bits results in the following normalized values.
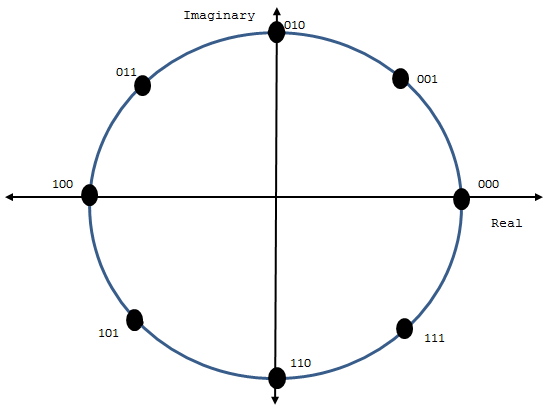
Using the mapping described in Modified CORDIC Algorithm, the object normalizes the angles across [0,π/4] and maps them to the correct octant at the end of the calculation.