monoCamera
Configure monocular camera sensor
Description
The monoCamera object holds information about the
configuration of a monocular camera sensor. Configuration information includes the
camera intrinsics, camera extrinsics such as its orientation (as described by pitch,
yaw, and roll), and the camera location within the vehicle. To estimate the intrinsic
and extrinsic camera parameters, see Calibrate a Monocular Camera.
For images captured by the camera, you can use the imageToVehicle and vehicleToImage functions to transform point locations between image
coordinates and vehicle coordinates. These functions apply projective transformations
(homography), which enable you to estimate distances from a camera mounted on the
vehicle to locations on a flat road surface.
Creation
Description
sensor = monoCamera(
creates a intrinsics,height)monoCamera object that contains the
configuration of a monocular camera sensor, given the intrinsic parameters
of the camera and the height of the camera above the ground.
intrinsics and height set the
Intrinsics and Height properties of the camera.
sensor = monoCamera(intrinsics,height,Name,Value)monoCamera(intrinsics,1.5,'Pitch',1) creates a
monocular camera sensor that is 1.5 meters above the ground and has a
1-degree pitch toward the ground. Enclose each property name in
quotes.
Properties
Intrinsic camera parameters, specified as either a cameraIntrinsics or cameraParameters object. The intrinsic camera parameters
include the focal length and optical center of the camera, and the size of
the image produced by the camera.
You can set this property when you create the object. After you create the object, this property is read-only.
Height from the road surface to the camera sensor, specified as a real
scalar. The height is the perpendicular distance from the ground to the
focal point of the camera. Specify the height in world units, such as
meters. To estimate this value, use the estimateMonoCameraParameters function.
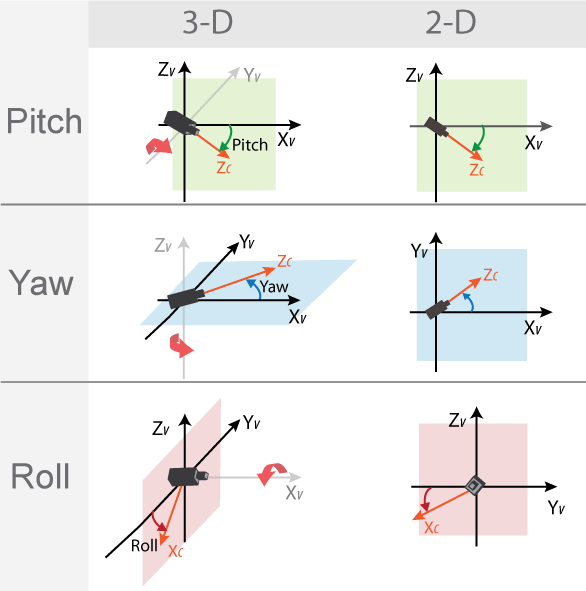
Pitch angle between the horizontal plane of the vehicle and the optical
axis of the camera, specified as a real scalar in degrees. To estimate this
value, use the estimateMonoCameraParameters function.
Pitch uses the ISO convention for rotation, with a
clockwise positive angle direction when looking in the positive direction of
the vehicle's YV axis.
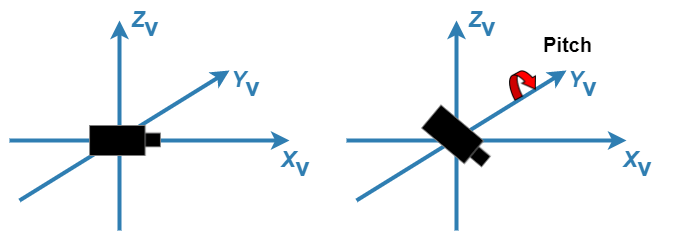
For more details, see Angle Directions.
Yaw angle between the XV axis of
the vehicle and the optical axis of the camera, specified as a real scalar
in degrees. To estimate this value, use the estimateMonoCameraParameters function.
Yaw uses the ISO convention for rotation, with a
clockwise positive angle direction when looking in the positive direction of
the vehicle's ZV axis.
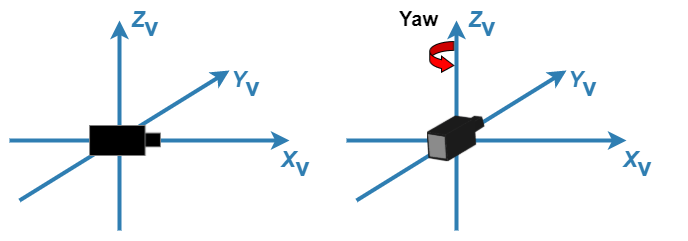
For more details, see Angle Directions.
Roll angle of the camera around its optical axis, returned as a real
scalar in degrees. To estimate this value, use the estimateMonoCameraParameters function.
Roll uses the ISO convention for rotation, with a
clockwise positive angle direction when looking in the positive direction of
the vehicle's XV axis.
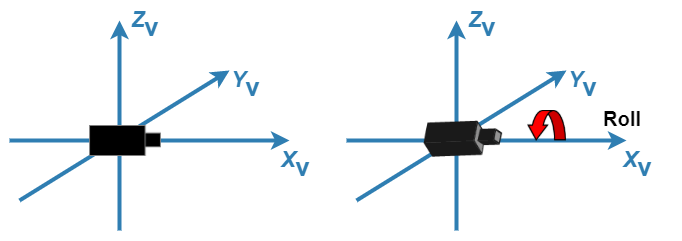
For more details, see Angle Directions.
Location of the center of the camera sensor, specified as a two-element
vector of the form [x
y]. Use this property to change the
placement of the camera. Units are in the vehicle coordinate system
(XV,
YV,
ZV).
By default, the camera sensor is located at the
(XV,
YV) origin, at the height
specified by Height.
World coordinate system units, specified as a character vector or string scalar. This property only stores the unit type and does not affect any calculations. Any text is valid.
You can set this property when you create the object. After you create the object, this property is read-only.
Object Functions
imageToVehicle | Convert image coordinates to vehicle coordinates |
vehicleToImage | Convert vehicle coordinates to image coordinates |
Examples
Create a forward-facing monocular camera sensor mounted on an ego vehicle. Examine an image captured from the camera and determine locations within the image in both vehicle and image coordinates.
Set the intrinsic parameters of the camera. Specify the focal length, the principal point of the image plane, and the output image size. Units are in pixels. Save the intrinsics as a cameraIntrinsics object.
focalLength = [800 800]; principalPoint = [320 240]; imageSize = [480 640]; intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
Specify the position of the camera. Position the camera 2.18 meters above the ground with a 14-degree pitch toward the ground.
height = 2.18; pitch = 14;
Define a monocular camera sensor using the intrinsic camera parameters and the position of the camera. Load an image from the camera.
sensor = monoCamera(intrinsics,height,'Pitch',pitch); Ioriginal = imread('road.png'); figure imshow(Ioriginal) title('Original Image')

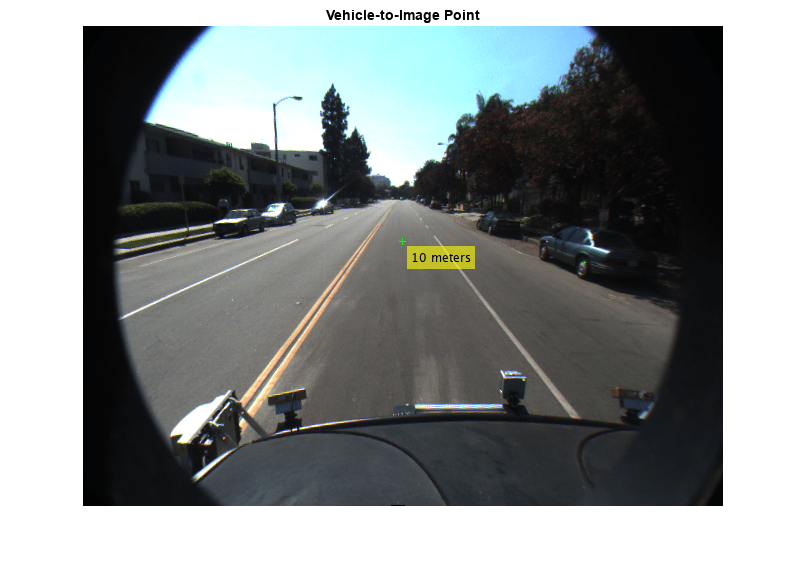
Determine the image coordinates of a point 10 meters directly in front of the camera. The X-axis points forward from the camera and the Y-axis points to the left.
xyVehicleLoc1 = [10 0]; xyImageLoc1 = vehicleToImage(sensor,xyVehicleLoc1)
xyImageLoc1 = 1×2
320.0000 216.2296
Display the point on the image.
IvehicleToImage = insertMarker(Ioriginal,xyImageLoc1); IvehicleToImage = insertText(IvehicleToImage,xyImageLoc1 + 5,'10 meters'); figure imshow(IvehicleToImage) title('Vehicle-to-Image Point')
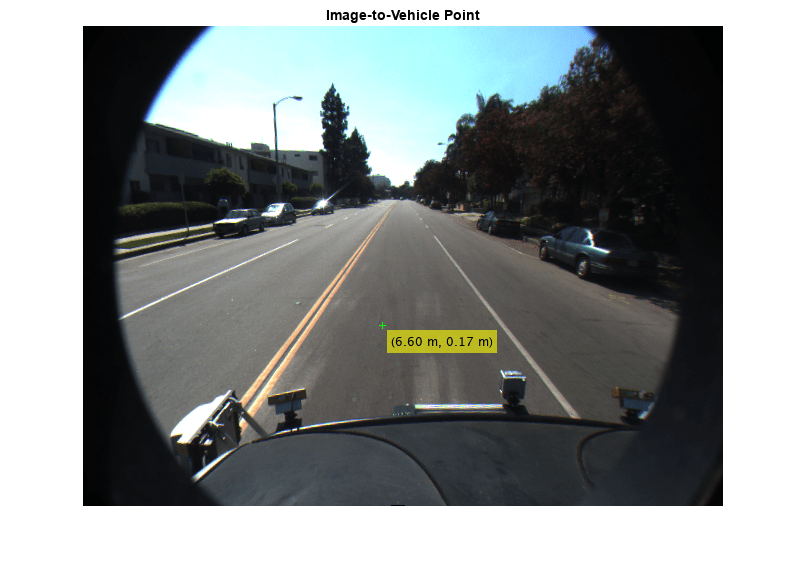
Determine the vehicle coordinates of a point that lies on the road surface in the image.
xyImageLoc2 = [300 300]; xyVehicleLoc2 = imageToVehicle(sensor,xyImageLoc2)
xyVehicleLoc2 = 1×2
6.5959 0.1732
The point is about 6.6 meters in front of the vehicle and about 0.17 meters to the left of the vehicle center.
Display the vehicle coordinates of the point on the image.
IimageToVehicle = insertMarker(Ioriginal,xyImageLoc2); displayText = sprintf('(%.2f m, %.2f m)',xyVehicleLoc2); IimageToVehicle = insertText(IimageToVehicle,xyImageLoc2 + 5,displayText); figure imshow(IimageToVehicle) title('Image-to-Vehicle Point')
Create a vision sensor by using a monocular camera configuration, and generate detections from that sensor.
Specify the intrinsic parameters of the camera and create a monoCamera object from these parameters. The camera is mounted on top of an ego vehicle at a height of 1.5 meters above the ground and a pitch of 1 degree toward the ground.
focalLength = [800 800];
principalPoint = [320 240];
imageSize = [480 640];
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
height = 1.5;
pitch = 1;
monoCamConfig = monoCamera(intrinsics,height,'Pitch',pitch);Create a vision detection generator using the monocular camera configuration.
visionSensor = visionDetectionGenerator(monoCamConfig);
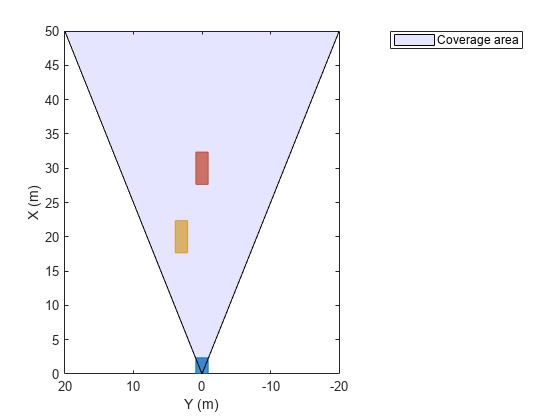
Generate a driving scenario with an ego vehicle and two target cars. Position the first target car 30 meters directly in front of the ego vehicle. Position the second target car 20 meters in front of the ego vehicle but offset to the left by 3 meters.
scenario = drivingScenario; egoVehicle = vehicle(scenario,'ClassID',1); targetCar1 = vehicle(scenario,'ClassID',1,'Position',[30 0 0]); targetCar2 = vehicle(scenario,'ClassID',1,'Position',[20 3 0]);
Use a bird's-eye plot to display the vehicle outlines and sensor coverage area.
figure bep = birdsEyePlot('XLim',[0 50],'YLim',[-20 20]); olPlotter = outlinePlotter(bep); [position,yaw,length,width,originOffset,color] = targetOutlines(egoVehicle); plotOutline(olPlotter,position,yaw,length,width); caPlotter = coverageAreaPlotter(bep,'DisplayName','Coverage area','FaceColor','blue'); plotCoverageArea(caPlotter,visionSensor.SensorLocation,visionSensor.MaxRange, ... visionSensor.Yaw,visionSensor.FieldOfView(1))
Obtain the poses of the target cars from the perspective of the ego vehicle. Use these poses to generate detections from the sensor.
poses = targetPoses(egoVehicle); [dets,numValidDets] = visionSensor(poses,scenario.SimulationTime);
Display the (X,Y) positions of the valid detections. For each detection, the (X,Y) positions are the first two values of the Measurement field.
for i = 1:numValidDets XY = dets{i}.Measurement(1:2); detXY = sprintf('Detection %d: X = %.2f meters, Y = %.2f meters',i,XY); disp(detXY) end
Detection 1: X = 19.09 meters, Y = 2.79 meters Detection 2: X = 27.81 meters, Y = 0.08 meters
More About
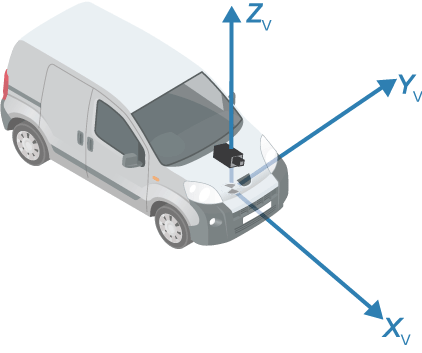
In the vehicle coordinate system
(XV,
YV,
ZV) defined by
monoCamera:
The XV-axis points forward from the vehicle.
The YV-axis points to the left, as viewed when facing forward.
The ZV-axis points up from the ground to maintain the right-handed coordinate system.
The default origin of this coordinate system is on the road surface, directly below the camera center. The focal point of the camera defines this center point.
To change the placement of the origin within the vehicle coordinate system, update
the SensorLocation property.
For more details about the vehicle coordinate system, see Coordinate Systems in Automated Driving Toolbox.
The monocular camera sensor uses clockwise positive angle directions when looking in the positive direction of the Z-, Y-, and X-axes, respectively.