laneBoundaryDetector
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
The laneBoundaryDetector object detects lane boundaries in images
by using a pretrained Cross Layer Refinement Network (CLRNet) lane detection model [1] or a pretrained recursive
video lane detector (RVLD) model [2].
Note
This object requires an internet connection to download the pretrained lane detection models for its first use.
Creation
Description
detector = laneBoundaryDetectorlaneBoundaryDetector object detector to
detect lane boundaries in images.
detector = laneBoundaryDetector(Model=modelName)laneBoundaryDetector object detector using
the specified lane detection model modelName.
Note: This feature also requires the Deep Learning Toolbox™ and the Deep Learning Toolbox Converter for ONNX™ Model Format support package. You can install the Deep Learning Toolbox Converter for ONNX Model Format support packages from the Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons.
Input Arguments
Output Arguments
Properties
Object Functions
detect | Detect lane boundaries in images |
Examples
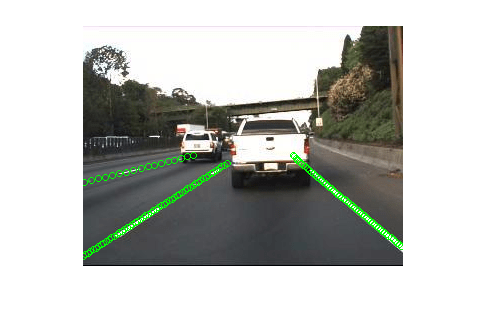
Detect lane boundary points in an RGB image by using the laneBoundaryDetector object.
Read an image into the workspace.
I = imread("highway.png");Initialize the laneBoundaryDetector object with CLRNet model.
detector = laneBoundaryDetector;
Detect the boundary points of the lanes in the image by using the detect object function of the laneBoundaryDetector object.
lanes = detect(detector,I,ROI=120,ExecutionEnvironment="cpu");Insert the detected lane boundary points into the image, as markers, by using the insertMarker function.
for i = 1:size(lanes{1},2) if ~isempty(lanes{1}{i}) I = insertMarker(I,lanes{1}{1,i},"o",Size=3); end end
Display the image, annotated with the detected lane boundary points.
imshow(I)
Since R2025a
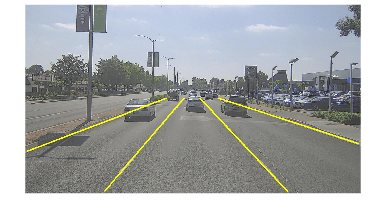
Detect lane boundary points in RGB images by using the laneBoundaryDetector object.
Download a ZIP file containing a subset of sensor data from the PandaSet data set, and then unzip the file. This data set contains camera images and camera sensor parameters collected using a forward-facing camera mounted on an ego vehicle.
dataFolder = pwd; dataFilename = "PandasetSensorData_23a.zip"; url = "https://ssd.mathworks.com/supportfiles/driving/data/" + dataFilename; filePath = fullfile(dataFolder,dataFilename); if ~isfile(filePath) websave(filePath,url) end unzip(filePath,dataFolder) dataset = fullfile(dataFolder,"PandasetSensorData"); data = fullfile(dataset,"Camera");
Create an image datastore from the loaded images.
imds = imageDatastore(data)
imds =
ImageDatastore with properties:
Files: {
' .../bsahoo/CustomerFiles/RVLD/Example/PandasetSensorData/Camera/0001.jpg';
' .../bsahoo/CustomerFiles/RVLD/Example/PandasetSensorData/Camera/0002.jpg';
' .../bsahoo/CustomerFiles/RVLD/Example/PandasetSensorData/Camera/0003.jpg'
... and 397 more
}
Folders: {
' .../sandbox/bsahoo/CustomerFiles/RVLD/Example/PandasetSensorData/Camera'
}
AlternateFileSystemRoots: {}
ReadSize: 1
Labels: {}
SupportedOutputFormats: ["png" "jpg" "jpeg" "tif" "tiff"]
DefaultOutputFormat: "png"
ReadFcn: @readDatastoreImage
Create a subset datastore, subimds, that contains the first 15 image files of imds.
subimds = subset(imds,(1:15));
Initialize a laneBoundaryDetector object with the RVLD model.
detector = laneBoundaryDetector(Model="RVLD");Detect the boundary points of the lanes in the sequence of images by using the detect object function of the laneBoundaryDetector object.
lanes = detect(detector,subimds,ROI=500,ExecutionEnvironment="cpu");Insert the detected lane boundary points into the sequences of images, as markers, by using the insertShape function.
for i = 1:numel(subimds.Files) img = readimage(subimds,i); for j = 1:size(lanes{i},2) if ~isempty(lanes{i}{j}) img = insertShape(img,"line",lanes{i}{1,j},LineWidth=8,ShapeColor="yellow"); end end imshow(img) end
More About
References
[1] Zheng, Tu, Yifei Huang, Yang Liu, Wenjian Tang, Zheng Yang, Deng Cai, and Xiaofei He. “CLRNet: Cross Layer Refinement Network for Lane Detection.” In 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 888–97. New Orleans, LA, USA: IEEE, 2022. https://doi.org/10.1109/CVPR52688.2022.00097.
[2] Jin, Dongkwon, Dahyun Kim, and Chang-Su Kim. “Recursive Video Lane Detection.” In 2023 IEEE/CVF International Conference on Computer Vision (ICCV), 8439–48. Paris, France: IEEE, 2023. https://doi.org/10.1109/ICCV51070.2023.00778.
[3] Hesai and Scale. PandaSet. Accessed September 18, 2025. https://pandaset.org/. The PandaSet data set is provided under the CC-BY-4.0 license.