A MicroAutoBox Workflow
From the series: Improving Your Racecar Development
Frank Schmidtmeier, dSPACE
Frank Schmidtmeier, of dSPACE, and Christoph Hahn, of MathWorks, guide you step-by-step through the workflow from reading sensor data to your Simulink® model to auto-generated C code running on the ECU.
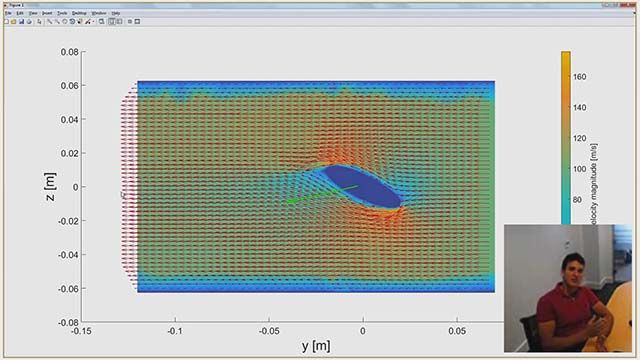
Starting from a software demonstration of the Formula Student team Strohm & Söhne at Technische Hochschule Nürnberg, where they show us a full vehicle dynamics controller receiving data from multiple sensors running on the MicroAutoBox during racing.
The workflow itself is explained using a simple example of a temperature sensor connected to the MicroAutoBox via CAN. Frank and Christoph will introduce you to the MicroAutoBox Simulink libraries (RTI CAN blockset), and you will learn how to set the correct configuration in your Simulink model in order to proceed with code generation. They will also show you how to deploy this code on the MicroAutoBox and how to monitor sensor data.
Frank introduces ControlDesk, a powerful tool to communicate with and log data from the MicroAutoBox. You can plot incoming data in real time, create thresholds for your signals, and use warning scopes to check if your signals are within the desired range. Lastly, you’ll learn how to easily create a .mat-file from logged data to have fast access to the measurements to do further data processing with MATLAB®.
Additional resources:
- Related MATLAB and Simulink student lounge episodes
- dSPACE
Published: 17 Dec 2015