unet3d
Create 3-D U-Net convolutional neural network for semantic segmentation of volumetric images
Since R2024a
Syntax
Description
unet3dNetwork = unet3d(inputSize,numClasses)unet3d includes a pixel classification layer
in the network to predict the categorical label for each pixel in an input volumetric
image.
Use unet3d to create the network architecture for 3-D U-Net. Train
the network using the Deep Learning Toolbox™ function trainnet (Deep Learning Toolbox).
[
also returns the size of an output volumetric image from the 3-D U-Net network.unet3dNetwork,outputSize] = unet3d(inputSize,numClasses)
[___] = unet3d(
specifies options using one or more name-value arguments in addition to the input arguments
in previous syntax. For example, specify
inputSize,numClasses,Name=Value)unet3d(inputSize,numClasses,EncoderDepth=4) to set the encoder depth to
4.
Examples
Create a 3-D U-Net network with an encoder-decoder depth of 2. Specify the number of output channels for the first convolution layer as 16.
imageSize = [128 128 128 3]; numClasses = 5; encoderDepth = 2; unet3dNetwork = unet3d(imageSize,numClasses,EncoderDepth=encoderDepth,NumFirstEncoderFilters=16)
unet3dNetwork =
dlnetwork with properties:
Layers: [45×1 nnet.cnn.layer.Layer]
Connections: [48×2 table]
Learnables: [46×3 table]
State: [20×3 table]
InputNames: {'encoderImageInputLayer'}
OutputNames: {'FinalNetworkSoftmax-Layer'}
Initialized: 1
View summary with summary.
Display the network.
figure(Units="normalized",Position=[0 0 0.5 0.55]);
plot(unet3dNetwork)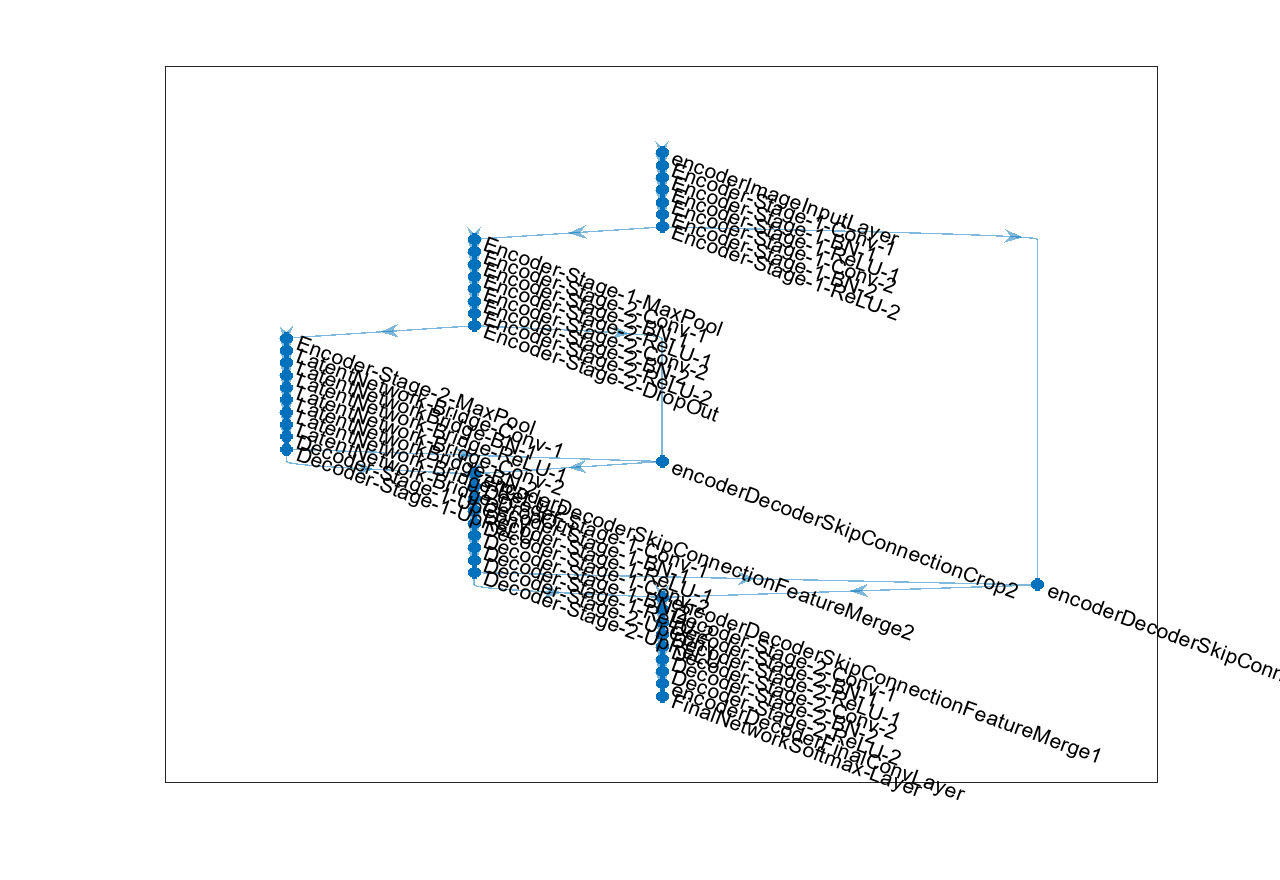
Use the deep learning network analyzer to visualize the 3-D U-Net network.
analyzeNetwork(unet3dNetwork);

The visualization shows the number of output channels for each encoder stage. The first convolution layers in encoder stages 1 and 2 have 16 and 32 output channels, respectively. The second convolution layers in encoder stages 1 and 2 have 32 and 64 output channels, respectively.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Tips
Use
'same'padding in convolution layers to maintain the same data size from input to output and enable the use of a broad set of input image sizes.Use patch-based approaches for seamless segmentation of large images. You can extract image patches by using the
randomPatchExtractionDatastorefunction.Use
'valid'padding in convolution layers to prevent border artifacts while you use patch-based approaches for segmentation.
References
[1] Çiçek, Ö., A. Abdulkadir, S. S. Lienkamp, T. Brox, and O. Ronneberger. "3D U-Net: Learning Dense Volumetric Segmentation from Sparse Annotation." Medical Image Computing and Computer-Assisted Intervention – MICCAI 2016. MICCAI 2016. Lecture Notes in Computer Science. Vol. 9901, pp. 424–432. Springer, Cham.
Extended Capabilities
Version History
Introduced in R2024a
See Also
Objects
dlnetwork(Deep Learning Toolbox)
Functions
trainnet(Deep Learning Toolbox) |unet|deeplabv3plus|semanticseg|evaluateSemanticSegmentation
Topics
- Get Started with Semantic Segmentation Using Deep Learning
- Deep Learning in MATLAB (Deep Learning Toolbox)