isDone
Syntax
Description
Examples
Perform stereo visual simultaneous localization and mapping (vSLAM) using the data from the UTIAS Long-Term Localization and Mapping Dataset provided by University of Toronto Institute for Aerospace Studies. You can download the data to a directory using a web browser, or by running this code:
ftpObj = ftp("asrl3.utias.utoronto.ca"); tempFolder = fullfile(tempdir); dataFolder = [tempFolder,'2020-vtr-dataset\UTIAS-In-The-Dark\']; zipFileName = [dataFolder,'run_000005.zip']; folderExists = exist(dataFolder,"dir");
Create a folder in a temporary directory to save the downloaded file and extract its contents.
if ~folderExists mkdir(dataFolder) disp("Downloading run_000005.zip (818 MB). This download can take a few minutes.") mget(ftpObj,"/2020-vtr-dataset/UTIAS-In-The-Dark/run_000005.zip",tempFolder); disp("Extracting run_000005.zip (818 MB) ...") unzip(zipFileName,dataFolder); end
Create two imageDatastore objects to store the stereo images.
imgFolderLeft = [dataFolder,'\images\left\']; imgFolderRight = [dataFolder,'\images\right\']; imdsLeft = imageDatastore(imgFolderLeft); imdsRight = imageDatastore(imgFolderRight);
Specify the intrinsic parameters and the baseline of the stereo camera, and use them to create a stereo visual SLAM object. The focal length, principal point, and image size is in pixels, and the baseline is in meters.
focalLength = [387.777 387.777];
principalPoint = [257.446 197.718];
imageSize = [384 512];
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
baseline = 0.239965;
vslam = stereovslam(intrinsics,baseline,MaxNumPoints=600, ...
TrackFeatureRange=[30 120],SkipMaxFrames=5);Process each pair of stereo images and visualize the camera poses and 3-D map points.
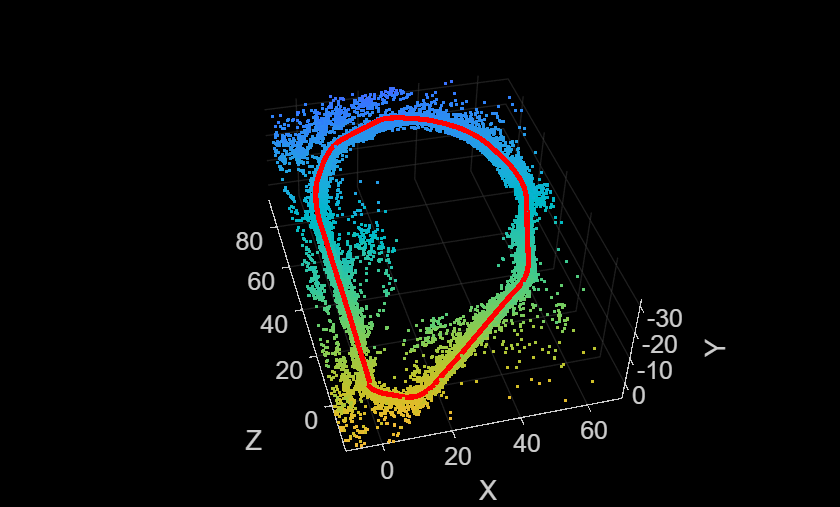
for i = 1:numel(imdsLeft.Files) leftImage = readimage(imdsLeft,i); rightImage = readimage(imdsRight,i); addFrame(vslam,leftImage,rightImage); if hasNewKeyFrame(vslam) % Query 3-D map points and camera poses xyzPoints = mapPoints(vslam); [camPoses,viewIds] = poses(vslam); % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); % Stop adding frames when tracking is lost if status == uint8(0) break end end
Once all the frames have been processed, reset the system.
while ~isDone(vslam) plot(vslam) end
reset(vslam)
Input Arguments
Version History
Introduced in R2024a