frest.Random
Random input signal
Description
Use a frest.Random object to represent a random input signal
for frequency response estimation. The random signal contains uniformly distributed random
numbers in the interval [0 Amplitude] or [Amplitude 0]
for positive and negative amplitudes, respectively.
Random signals are useful because they can excite the system uniformly at all frequencies up to the Nyquist frequency.
You can use a random input signal for estimation at the command line, in the Model Linearizer, or with the Frequency Response Estimator block. The estimation algorithm injects the signal at the input point you specify for estimation, and measures the response at the output point.
When you use a random input signal for estimation, the frequencies returned in the
estimated frd model depend on the length and sampling time of the signal.
They are the frequencies obtained in the fast Fourier transform of the input signal. For more
information, see the Algorithm section of frestimate.
To view a plot of your input signal, type plot(input). To create a
timeseries object for your input signal, use the generateTimeseries command.
Creation
Description
input = frest.Random(sys)sys. For instance, if you have an exact linearization of your
system, you can use it to initialize the parameters.
input = frest.Random(Name,Value)
Input Arguments
Properties
Object Functions
frestimate | Frequency response estimation of Simulink models |
generateTimeseries | Generate time-domain data for input signal |
frest.simCompare | Plot time-domain simulation of nonlinear and linear models |
frest.simView | Plot frequency response model in time- and frequency-domain |
getSimulationTime | Final time of simulation for frequency response estimation |
Examples
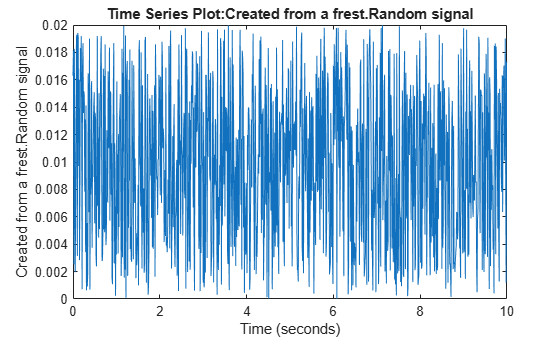
Create a Random input signal with 1000 samples taken at 100 Hz and an amplitude of 0.02.
input = frest.Random('Amplitude',0.02,... 'Ts',1/100,... 'NumSamples',1000);
Plot the random signal.
plot(input)
Create a multiplicative lagged Fibonacci generator random stream.
stream = RandStream('mlfg6331_64','Seed',0);
Create a random input signal using this stream.
input = frest.Random('Stream',stream);Alternative Functionality
Model Linearizer
In the Model Linearizer, to use a random input signal for estimation, on the Estimation tab, select Input Signal > Random.
Version History
Introduced in R2009b