Change Operating Points
Libraries:
Simulink Control Design /
Autotuning
Description
The Change Operating Points block lets you manage and switch operating points during simulation. You can use the block in one of these configurations:
Import predefined operating data from workspace and switch between operating range during the simulation.
Automatically snapshot at specified times or events during simulation to obtain the operating point data at the specified range. For example, for a motor model, you can snapshot at:
3, 5, and 7 s (time-based).
2000, 5000, and 8000 rpm (event-based).
When you have predefined operating point data, you can use this block in gain-scheduled controller tuning workflows. This block helps generate reference signals which move your plant from one operating point to another. Otherwise, snapshot the operating points first, and then use the data for gain scheduling workflows.
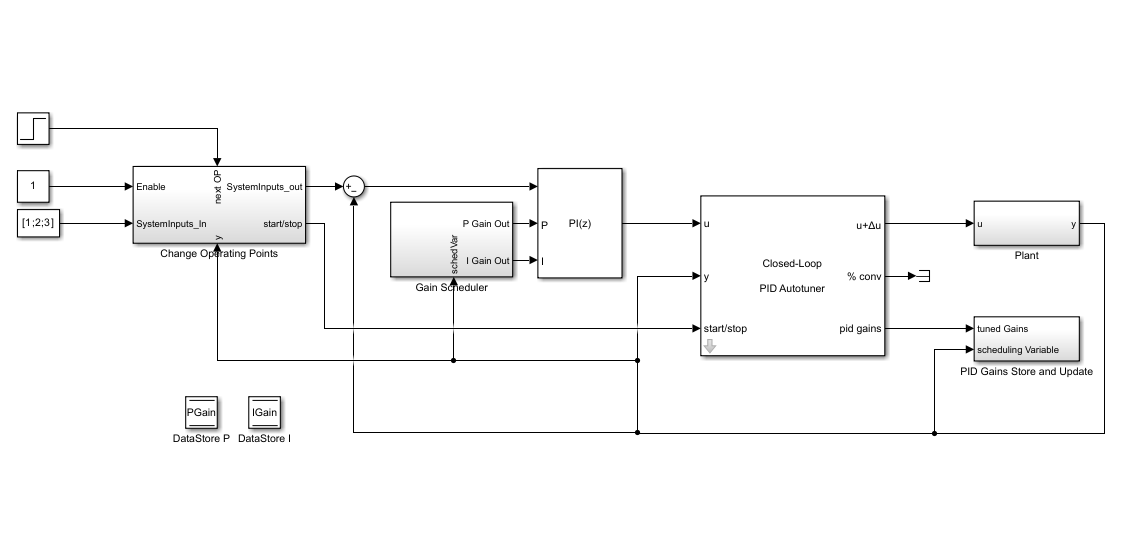
Typically, tuning a gain-scheduled controller is a complex process. It requires you to run multiple simulations for tuning at each operating point and provide a logic to store PID gains at that operating point. Using this block, along with the PID Gains Store and Update and PID Gain Scheduler blocks, helps you implement a streamlined workflow for autotuning gain-scheduled PID controllers over an operating range in a single run. To do so, use this workflow.
Switch between predefined or snapshot operating point data during the simulation using the Change Operating Points block.
Perform autotuning at the operating points using Closed-Loop PID Autotuner.
Store the PID gains corresponding to the operating point in an array using PID Gains Store and Update block.
Perform lookup table based gain scheduling from the array using the PID Gain Scheduler block.
On a high level, you can use these blocks to implement the gain-scheduled workflow as shown in this diagram.
Ports
Input
Specify the value of the input level at the operating point.
When the block is operating in the snapshot mode, the block directly passes through this input to the systeminputs_out port.
Specify a signal to enable (1) or disable
(0) the block action.
Specify the time vector to start autotuning. The value at each index of this vector is the autotuning start time for the operating point at that index. Use the Autotuning time span (sec) parameter to specify the duration of the experiment.
Dependencies
To enable this port, use this configuration.
Set Operating mode to
Import operating points.Select Use block for autotuning.
Set Method for starting autotuning to
External time vector.
Specify the custom logic to switch to the next operating point.
Dependencies
To enable this port, use this configuration.
Set Operating mode to
Import operating points.Set Transition method to
External trigger.
Connect the output of your plant to this port. The block determines the current operating state of the system using this signal.
Dependencies
To enable this port, use this configuration.
Set Operating mode to
Import operating points.Select Use block for autotuning.
Set Method for starting autotuning to
Time after reaching steady-state.
Use this port to manually specify a scalar flag to enable
(1) or disable (0) the
autotuning process.
Dependencies
To enable this port, use this configuration.
Set Operating mode to
Import operating points.Select Use block for autotuning and Add enable/disable port for autotuning.
Specify the time-based or event-based snapshot triggers at which you want to extract the operating point of the model.
When Snapshot mode is
Time-based, specify the time values for which
you want to snapshot operating point data. For example, to snapshot at
3, 5, and 7 s, use a vector [3,5,7] as input to this
port.
When Snapshot mode is Event-based, the block snapshots the operating point data at the rising edges of the input signal.
Dependencies
To enable this port, set Operating mode to
Snapshot operating points, and use
one of these configurations.
Set Snapshot mode to Time-based and select Use external source.
Set Snapshot mode to Event-based.
Output
Reference signal to move the system to the switched operating point.
Signal to start and stop the autotuning process with the Closed-Loop PID Autotuner block. The generated signal depends on the additional parameters such as the autotuning method and steady-state settings.
Dependencies
To enable this port, set Operating mode to
Import operating points and select
Use block for autotuning.
Parameters
Import operating point Tab
Specify the mode for obtaining the operating point data.
Import operating points— Specify predefined operating point data by either manually editing the table in block dialog box or importing anOperatingPointobject.In this mode, you can use the block to implement a streamlined workflow for autotuning gain-scheduled PID controllers over an operating range.
Snapshot operating points— Snapshot operating points at specified times or events during simulation.
Programmatic Use
Block Parameter:
OperatingMode |
| Type: string |
Values:
"Import operating points" |
"Snapshot operating points" |
Default:
"Import operating points" |
Specify the input method for operating point data.
Manually edit table — Manually specify the operating point data in the block dialog.
Automatically fill table — Import operating point data using an
OperatingPointobject. Typically, you obtain operating points using functions such asoperpointandfindop, or Steady State Manager and Model Linearizer apps. You can also import the operating point data obtained using the snapshot mode of this block.
Dependencies
To enable this parameter, set Operating mode
to Import operating points.
Programmatic Use
Block Parameter:
InputMethod |
| Type: string |
Values:
"Manually edit table" |
"Automatically fill table" |
Default:
"Manually Edit Table" |
Specify the number of inputs in the model.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Input method to Manually edit
table.
Programmatic Use
Block Parameter:
NumSystemInputs |
| Type: string |
| Values: positive scalar in quotes |
Default:
"3" |
Specify the workspace from which you want to import the operating
point data from. The specified workspace must contain the
OperatingPoint object with the same name as the
value in Operating point variable.
Base workspace— Import data from base MATLAB® workspace.Model workspace— Import data from the current model workspace.Data dictionary— Import data from a Simulink® data dictionary.
Additionally, to import the operating point data generated by the block in the snapshot mode, click the Save to Workspace button and specify the name of the operating point structure.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Input method to Automatically
fill table.
Programmatic Use
Block Parameter:
ImportWorkspace |
| Type: string |
Values:
"Data dictionary" | "Base
workspace" | "Model
workspace" |
Default:
"Data dictionary" |
Specify the name of the data dictionary to read the operating point
data from. The OperatingPoint object must be stored in
the Other Data section of the dictionary. For more
information, see What Is a Data Dictionary?.
Dependencies
To enable this parameter, set these parameters.
Operating mode to
Import operating pointsInput method to Automatically fill table
Workspace to
Data dictionary
Programmatic Use
Block Parameter:
DataDictionaryName |
| Type: string |
Default:
"myDataDictionary.sldd" |
Specify the name of the operating point variable.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Input method to Automatically
fill table.
Programmatic Use
Block Parameter:
OperatingPointVariable |
| Type: string |
Default:
"myOperatingPoint" |
Specify the snapshot mode to obtain the operating point data.
Dependencies
To enable this parameter, set Operating mode
to Snapshot operating points.
Programmatic Use
Block Parameter:
SnapshotMode |
| Type: string |
Values:
"Time-based" |
"Event-based" |
Default:
"Time-based" |
Specify the simulation snapshot times at which to extract the operating point of the model. Use a scalar for a single snapshot or a vector for multiple snapshots.
Dependencies
To enable this parameter, set Operating mode
to Snapshot operating points and
Snapshot mode to
Time-based.
Programmatic Use
Block Parameter:
SnapshotTimes |
| Type: string |
| Values: scalar or vector in quotes |
Default:
"[1 2 3]" |
Specify the simulation snapshot times as block input.
Dependencies
To enable this parameter, set Operating mode
to Snapshot operating points and
Snapshot mode to
Time-based.
Programmatic Use
Block Parameter:
SnapshotTimesExternalSource |
| Type: string |
Value
"off" | "on" |
Default:
"off" |
Specify the sample time.
Dependencies
To enable this parameter, set Operating mode
to Snapshot operating points and
Snapshot mode to
Time-based.
Programmatic Use
Block Parameter:
SampleTime |
| Type: string |
| Values: positive scalar in quotes | "–1" |
Default:
"–1" |
Operating point data, specified as multiple table entries.
When the Input Method is Manually edit table, use the Value column of the table to manually specify the corresponding data for index, snapshot time, and input level of the operating points.
When the Input Method is Automatically fill table, the Value show the value of the operating point based on the imported operating point.
To populate the entries of the table after obtaining the data in snapshot mode, click Save to Table.
Dependencies
To enable manual data entry for the Value
column of this table, set Operating mode to
Import operating points and
Input method to Manually edit
table.
Programmatic Use
Block Parameter:
OperatingPointTable |
| Type: string |
| Values: cell array in quotes |
Default:
"{'Indicies','[1 2 3]';'Times (sec)','[0 1
2]';'SystemInput_1','[1 1 1]';'SystemInput_2','[2 2
2]';'SystemInput_3','[3 3 3]'}" |
Specify a name for the Simulink.Bus object created by the block.
Programmatic Use
Block Parameter:
BusName |
| Type: string |
| Values: string |
Default:
"scdPlantOPsBusObject" |
Specify a bus name for the object manually.
Programmatic Use
Block Parameter:
SpecifyBusName |
| Type: string |
Value
"off" | "on" |
Default:
"off" |
Specify the floating-point precision based on simulation environment or hardware requirements.
Programmatic Use
Block Parameter:
BlockDataType |
| Type: string |
Values:
"Double" | "Single"
|
Default:
"Double" |
Change operating point setting Tab
Use the block for gain-scheduled PID autotuning workflow. When you enable this option, the block generates a signal at the start_stop output port. Use the start_stop signal to start and stop the autotuning process with the Closed-Loop PID Autotuner block. The generated signal depends on the additional parameters such as the autotuning method and steady-state settings.
Dependencies
To enable this parameter, set Operating mode
to Import operating points.
Programmatic Use
Block Parameter:
UseAutotuning |
| Type: string |
Value
"off" | "on" |
Default:
"on" |
Specify the method for starting PID autotuning.
External time vector— Specify a time vector using the autotuning times input port. The value at each index of this vector is the autotuning start time for the operating point at that index. Use the Autotuning time span (sec) parameter to specify the duration of the experiment.Time after reaching steady-state— Start the autotuning when the model output reaches steady state. Use the Settling time upper bounds, Settling time lower bounds, and Settling time interval parameters to define the criteria for steady state of each operating point.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and select
Use block for autotuning.
Programmatic Use
Block Parameter:
AutotuningTriggerMethod |
| Type: string |
Values:
"External time vector" | "Time after
reaching steady-state" |
Default:
"External time vector" |
Add the enable autotuning input port to the
block. Use this port to manually specify a scalar flag to enable
(1) or disable (0) the
autotuning process.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and select
Use block for autotuning.
Programmatic Use
Block Parameter:
AddEnableDisableAutotuning |
| Type: string |
Value
"off" | "on" |
Default:
"on" |
Specify the duration of the autotuning experiment. You must let the experiment run long enough for the algorithm to collect sufficient data for a good estimate of the plant frequency responses. Running the experiment for insufficient time may result in inaccurate results. For more information, see the start/stop input port of the Closed-Loop PID Autotuner block.
To run the autotuning experiment with the same duration for all operating points, specify a positive scalar value.
To run the experiment for different duration for each operating point, specify a vector of positive values. Each duration value corresponds to the operating point at that index of the vector.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and select
Use block for autotuning.
Programmatic Use
Block Parameter:
AutotuningExperimentLength |
| Type: string |
| Values: positive scalar or vector in quotes |
Default:
"10" |
Specify the number of samples for which the block delays starting the autotuning process after the model reaches the steady state.
Dependencies
To enable this parameter, use this configuration.
Set Operating mode to
Import operating points.Select Use block for autotuning.
Set Method for starting autotuning to
Time after reaching steady-state.
Programmatic Use
Block Parameter:
NumAutotuningDelaySamples |
| Type: string |
| Values: positive scalar in quotes |
Default:
"2" |
Specify the operating point transition method.
Internal time vector (from operating point table)— Change operating points based on the values in the time vector of the operating point data.Time after reaching steady-state— Change operating points after the model output reaches the steady state condition defined for that operating point.Time after completing autotuning— Change operating points after the autotuning time span has passed for that operating point.External trigger— Change operating point based on the custom logic specified at the next OP block input port.
Dependencies
To enable this parameter, set Operating mode
to Import operating points.
Programmatic Use
Block Parameter:
TransitionMethod |
| Type: string |
Values:
"Internal time vector (from operating point
table)" | "Time after reaching
steady-state" | "Time after completing
autotuning" | "External
trigger" |
Default:
"Internal time vector (from operating point
table)" |
Specify the algorithm to transition from one operating point to another.
Step— Use a step signal to step between two operating levels.Ramp— Use a ramp signal to between two operating levels as a constantly increasing or decreasing signal.
Dependencies
To enable this parameter, set Operating mode
to Import operating points.
Programmatic Use
Block Parameter:
ChangeOPAlgorithm |
| Type: string |
Value
"Step" | "Ramp" |
Default:
"Step" |
Specify the limit of the rising rate of the input signal.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Change operating point algorithm to
Ramp.
Programmatic Use
Block Parameter:
RampSlewUpRate |
| Type: string |
| Values: scalar or vector in quotes |
Default:
"1" |
Specify the lower limit on the falling rate of the input signal.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Change operating point algorithm to
Ramp.
Programmatic Use
Block Parameter:
RampSlewLoRate |
| Type: string |
| Values: scalar or vector in quotes |
Default:
"–1" |
Specify the number of samples for which the block delays transition to the next operating point after the model reaches the steady state.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Transition method to Time
after reaching steady-state.
Programmatic Use
Block Parameter:
NumTransitionDelaySamples |
| Type: string |
| Values: nonnegative scalar in quotes |
Default:
"2" |
Specify the number of samples for which the block delays transition to the next operating point after the autotuning experiment has completed.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Transition method to Time
after completing autotuning.
Programmatic Use
Block Parameter:
NumSamplesAutotuningTranstion |
| Type: string |
| Values: nonnegative scalar in quotes |
Default:
"2" |
Specify the upper bound for the operating value used to determine settling time and steady state of the operating point.
Each value of this vector corresponds to the upper bound for the operating point value at that index.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Transition method to Time
after reaching steady-state.
Programmatic Use
Block Parameter:
SettlingTimeUpper |
| Type: string |
| Values: scalar or vector in quotes |
Default:
"[1.1 2.1 3.1]" |
Specify the lower bound for the operating value used to determine settling time and steady state of the operating point.
Each value of this vector corresponds to the lower bound for the operating point value at that index.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Transition method to Time
after reaching steady-state.
Programmatic Use
Block Parameter:
SettlingTimeLower |
| Type: string |
| Values: scalar or vector in quotes |
Default:
"[0.9 1.9 2.9]" |
Specify the time interval for which the operating condition remains in steady state.
Use a vector to specify different time intervals for different operating points.
Dependencies
To enable this parameter, set Operating mode
to Import operating points and
Transition method to Time
after reaching steady-state.
Programmatic Use
Block Parameter:
SettlingTimeInterval |
| Type: string |
| Values:scalar or vector in quotes |
Default:
"5" |
Extended Capabilities
The Change Operating Points block supports code generation only
when Operating mode is Import operating
points.
Version History
Introduced in R2023b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)