Discrete State-Space
Implement discrete state-space system
Libraries:
Simulink /
Discrete
Simulink /
Quick Insert /
Discrete
HDL Coder /
RCP and HIL
Description
The Discrete State-Space block implements the system described by
where u is the input, x is the state, and y is the output. The matrix coefficients must have these characteristics, as illustrated in the following diagram:
A must be an n-by-n matrix, where n is the number of states.
B must be an n-by-m matrix, where m is the number of inputs.
C must be an r-by-n matrix, where r is the number of outputs.
D must be an r-by-m matrix.

The block accepts one input and generates one output. The width of the input vector is the number of columns in the B and D matrices. The width of the output vector is the number of rows in the C and D matrices. To define the initial state vector, use the Initial conditions parameter.
To specify a vector or matrix of zeros for A,
B, C, D, or
Initial conditions, use the zeros function.
Block Behavior for Empty Matrices
When the matrices A, B,
and C are empty (for example, []),
the functionality of the block becomes y(n) = Du(n).
If the Initial conditions vector is also empty, the block uses an initial state vector of zeros.
Examples
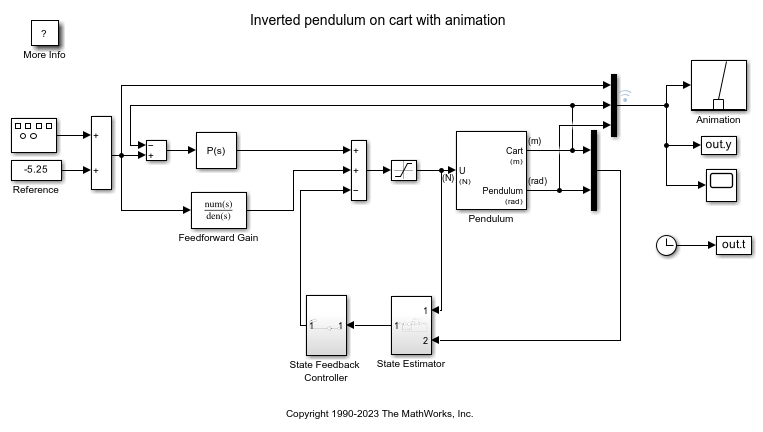
Inverted Pendulum with Animation
Use Simulink® to model and animate an inverted pendulum system. An inverted pendulum has its center of mass above its pivot point. To stably maintain this position, the system implements control logic to move the pivot point below the center-of mass as the pendulum starts to fall. The inverted pendulum is a classic dynamics problem used to test control strategies.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
Version History
Introduced before R2006a
See Also
State-Space | Fixed-Point State-Space | Generate HDL Code from Simulink Model (HDL Coder) | Basic HDL Code Generation Workflow (HDL Coder)