Discrete Filter
Model Infinite Impulse Response (IIR) filters
Libraries:
Simulink /
Discrete
DSP System Toolbox /
Filtering /
Filter Implementations
Description
The Discrete Filter block independently filters each channel of the input
signal with the specified digital IIR filter. You can specify the filter structure as
Direct form I, Direct form I transposed,
Direct form II, or Direct form II transposed.
The block implements static filters with fixed coefficients. You can tune the
coefficients of these static filters.
This block filters each channel of the input signal independently over time. The Input processing parameter allows you to specify how the block treats each element of the input. You can specify treating input elements as an independent channel (sample-based processing), or treating each column of the input as an independent channel (frame-based processing). To perform frame-based processing, you must have a DSP System Toolbox™ license.
The output dimensions equal the input dimensions, except when you specify a matrix of filter taps for the Numerator coefficients parameter. When you do so, the output dimensions depend on the number of different sets of filter taps you specify.
Use the Numerator coefficients parameter to specify the coefficients of the discrete filter numerator polynomial. Use the Denominator coefficients parameter to specify the coefficients of the denominator polynomial of the function. The Denominator coefficients parameter must be a vector of coefficients.
Specify the coefficients of the numerator and denominator polynomials in ascending powers of z-1. The Discrete Filter block lets you use polynomials in z-1 (the delay operator) to represent a discrete system. Signal processing engineers typically use this method. Conversely, the Discrete Transfer Fcn block lets you use polynomials in z to represent a discrete system. Control engineers typically use this method. When the numerator and denominator polynomials have the same length, the two methods are identical.
Specifying Initial States
In Dialog parameters and Input port(s) modes, the block initializes the internal filter states to zero by default, which is equivalent to assuming past inputs and outputs are zero. You can optionally use the Initial states parameter to specify nonzero initial states for the filter delays.
To determine the number of initial state values you must specify, and how to specify them, see the following table on valid initial states and Number of Delay Elements (Filter States). The Initial states parameter can take one of four forms as described in the following table.
Valid Initial States
| Initial state | Examples | Description |
|---|---|---|
|
Scalar |
Each delay element for
each channel is set to |
The block initializes all delay elements in the filter to the scalar value. |
|
Vector |
For a filter with two delay elements: [d1d2] The delay elements for all channels are d1 and d2. |
Each vector element specifies a unique initial condition for a corresponding delay element. The block applies the same vector of initial conditions to each channel of the input signal. The vector length must equal the number of delay elements in the filter (specified in the table Number of Delay Elements (Filter States)). |
|
Vector or matrix | For a three-channel input signal and a filter with two delay elements: [d1d2D1D2d1d2] or
|
Each vector or matrix element specifies a unique initial condition for a corresponding delay element in a corresponding channel:
|
The number of delay elements (filter states) per input channel depends on the filter structure, as indicated in the following table.
Number of Delay Elements (Filter States)
| Filter Structure | Number of Delay Elements Per Channel |
|---|---|
|
|
|
|
|
|
The following tables describe the valid initial states for different sizes of input and different number of channels depending on whether you set the Input processing parameter to frame based or sample based.
Frame-Based Processing
| Input | Number of Channels | Valid Initial States (Dialog Box) | Valid Initial States (Input Port) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
Sample-Based Processing
| Input | Number of Channels | Valid Initial States (Dialog Box) | Valid Initial States (Input Port) |
|---|---|---|---|
| 1 |
|
|
| N |
|
|
| K × N |
|
|
When the Initial states is a scalar, the block initializes all filter
states to the same scalar value. Enter 0 to initialize all states
to zero. When the Initial states is a vector or a matrix, each
vector or matrix element specifies a unique initial state. This unique state
corresponds to a delay element in a corresponding channel:
The vector length must equal the number of delay elements in the filter,
M = max(number of zeros, number of poles).The matrix must have the same number of rows as the number of delay elements in the filter,
M = max(number of zeros, number of poles). The matrix must also have one column for each channel of the input signal.
The relationship between the initial filter output y1, the initial input u1, and the initial state [x1, x2] is given by the following equation.
where,
b1, b2, and b3 are the numerator coefficients of the discrete filter.
a1, a2, and a3 are the denominator coefficients of the discrete filter.
Examples
This example shows how to specify a vector of non-zero initial conditions for the Discrete Filter block.


The Scope shows that with the Initial states of the Discrete Filter block set to [1 2], the difference between the signal filtered by the Discrete Filter block and the signal from the filter's building blocks is zero. This demonstrates that you can enter the initial conditions of the Discrete Filter block as a vector of [1 2]. As an alternative, to achieve the same result, you can set the initial condition of Unit Delay to 1 and Unit Delay1 to 2.
Extended Examples

Model Fault-Tolerant Fuel Control System
Combine Stateflow® and Simulink® capabilities to model hybrid systems. This type of modeling is particularly useful for systems that have numerous possible operational modes based on discrete events. Traditional signal flow is handled in Simulink while changes in control configuration are implemented in Stateflow. The model described in this example represents a fuel control system for a gasoline engine. The system is robust in that it detects individual sensor failures, and the control system is dynamically reconfigured for uninterrupted operation.
Ports
Input
Output
Parameters
Main
Specify the discrete IIR filter structure.
Dependencies
To use any filter structure other than Direct form
II, you must have an available DSP System Toolbox license.
Programmatic Use
Block Parameter:
FilterStructure |
| Type: character vector |
Values:
'Direct form II' | 'Direct form I transposed' | 'Direct
form I' | 'Direct form II transposed' |
Default:
'Direct form II'
|
Specify the source of the numerator coefficients as
Dialog or Input
port.
Programmatic Use
Block Parameter:
NumeratorSource |
| Type: character vector |
Values:
'Dialog' | 'Input port' |
Default:
'Dialog'
|
Specify the numerator coefficients of the discrete filter as descending powers of
z. Use a row vector to specify the coefficients
for a single numerator polynomial. To specify coefficients for multiple
filters, specify a matrix of coefficients, where each row represents a
different set of filter taps. To implement multiple filters,
Filter structure must be Direct
form II, Input processing must be
Elements as channels (sample based), and
the input must be a scalar.
Dependencies
To enable this parameter, set the Numerator
Source to Dialog.
Programmatic Use
Block Parameter:
Numerator |
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'[1]'
|
Specify the source of the denominator coefficients as
Dialog or Input
port.
To set Denominator Source to Input port,
select the Optimize by skipping divide by leading denominator
coefficient (a0) parameter.
Programmatic Use
Block Parameter:
DenominatorSource |
| Type: character vector |
Values:
'Dialog' | 'Input port' |
Default:
'Dialog'
|
Specify the denominator coefficients of the discrete filter as descending powers of z. Use a row vector to specify the coefficients for a single denominator polynomial.
When you select the Optimize by skipping divide by leading denominator coefficient (a0) parameter, an error occurs if you specify the denominator coefficients in the block dialog box and a0 ≠ 1.
Dependencies
To enable this parameter, set the Denominator
Source to Dialog.
Programmatic Use
Block Parameter:
Denominator |
| Type: character vector |
| Values: scalar | vector |
Default:
'[1 0.5]'
|
Specify the source of the initial states as
Dialog or Input
port.
Programmatic Use
Block Parameter:
InitialStatesSource |
| Type: character vector |
Values:
'Dialog' | 'Input port' |
Default:
'Dialog'
|
Specify the initial filter states as a scalar, vector, or matrix. To learn how to specify initial states, see Specifying Initial States.
Dependencies
To enable this parameter, set the Filter
structure to Direct form
II or Direct form II
transposed, and set Initial states
Source to Dialog.
Programmatic Use
Block Parameter:
InitialStates |
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'0'
|
Alternatively, use
IC.
Specify the initial numerator filter states as a scalar, vector, or matrix. To learn how to specify initial states, see Specifying Initial States.
Dependencies
To enable this port, set the Filter structure
to Direct form I or Direct
form I transposed.
Programmatic Use
Block Parameter:
InitialStates |
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'0'
|
Specify the initial denominator filter states as a scalar, vector, or matrix. To learn how to specify initial states, see Specifying Initial States.
Dependencies
To enable this port, set the Filter structure
to Direct form I or Direct
form I transposed.
Programmatic Use
Block Parameter:
InitialDenominatorStates |
| Type: character vector |
| Values: scalar | vector | matrix |
Default:
'0'
|
Specify the trigger event to use to reset the states to the initial conditions.
| Reset Mode | Behavior |
|---|---|
None | No reset |
Rising | Reset on a rising edge |
Falling | Reset on a falling edge |
Either | Reset on either a rising or falling edge |
Level | Reset in either of these cases:
|
Level hold | Reset when the reset signal is nonzero at the current time step |
Programmatic Use
Block Parameter:
ExternalReset |
| Type: character vector |
Values: 'None' |
'Rising' | 'Falling' |
'Either' | 'Level' | 'Level
hold' |
Default: 'None' |
Specify whether the block performs sample- or frame-based processing.
Elements as channels (sample based)— Process each element of the input as an independent channel.Columns as channels (frame based)— Process each column of the input as an independent channel.
Dependencies
Frame-based processing requires a DSP System Toolbox license.
For more information, see Sample- and Frame-Based Concepts (DSP System Toolbox).
Programmatic Use
Block Parameter:
InputProcessing |
| Type: character vector |
Values:
'Columns as channels (frame based)' | 'Elements as
channels (sample based)' |
Default:
'Elements as channels (sample
based)' |
When you select this check box, the block does not divide by a0 either in simulation or in the generated code. This parameter optimizes your code. An error occurs if you specify the denominator coefficients in the block dialog box and a0 ≠ 1.
If you specify the denominator coefficients from the input port Den, you must select the Optimize by skipping divide by leading denominator coefficient (a0) parameter. When you select this checkbox, the block ignores the leading denominator coefficient a0 and replaces it with 1.
When you clear this check box, the block is fully tunable during simulation. It divides by a0 in both simulation and code generation.
Programmatic Use
Block Parameter:
a0EqualsOne
|
| Type: character vector |
Values:
'off' | 'on' |
Default:
'off'
|
Specify the time interval between samples. To inherit the sample time, set this
parameter to -1. For more information, see Specify Sample Time.
Dependencies
This parameter is visible only if you set it to a value other than
-1. To learn more, see Blocks for Which Sample Time Is Not Recommended.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SampleTime |
| Values: | "-1" (default) | scalar or vector in quotes |
Click this button to open the Filter Visualization Tool (fvtool (DSP System Toolbox)) and display the filter response of the filter
defined in the block dialog box.
Dependencies
To enable this parameter, set the Numerator Source and
Denominator Source parameters to
Dialog.
This parameter appears only if you have a valid DSP System Toolbox license.
Data Types
Specify the state data type. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Same as inputA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
StateDataTypeStr |
| Type: character vector |
Values:
'Inherit: Same as input' | 'int8' | 'int16' | 'int32' |
'int64' | 'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Same as input' |
Specify the numerator coefficient data type. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in signed integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
NumCoefDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'int8' | 'int16'
| 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' |
'<data type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the minimum value that a numerator coefficient can have. The
default value is [] (unspecified). Simulink® software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
NumCoefMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the maximum value that a numerator coefficient can have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
NumCoefMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the product output data type for the numerator coefficients. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
NumProductDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'int8' | 'int16' | 'int32' | 'int64' |
'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the accumulator data type for the numerator coefficients. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
NumAccumDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'Inherit: Same as product output' | 'int8' |
'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data
type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the denominator coefficient data type. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in integer, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
DenCoefDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'int8' | 'int16'
| 'int32' | 'int64' | 'fixdt(1,16)' | 'fixdt(1,16,0)' |
'<data type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the minimum value that a denominator coefficient can have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
DenCoefMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the maximum value that a denominator coefficient can have. The
default value is [] (unspecified). Simulink software uses this value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
DenCoefMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the product output data type for the denominator coefficients. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
DenProductDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'int8' | 'int16' | 'int32' | 'int64' |
'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the accumulator data type for the denominator coefficients. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
DenAccumDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'Inherit: Same as product output' | 'int8' |
'int16' | 'int32' | 'int64' | 'fixdt(1,16,0)' | '<data
type expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the output data type. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Inherit via internal ruleA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Programmatic Use
Block Parameter:
OutDataTypeStr |
| Type: character vector |
Values:
'Inherit: Inherit via internal rule' | 'Inherit: Same
as input' | 'int8' | 'int16' | 'int32' | 'int64' |
'fixdt(1,16)' | 'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Inherit via internal rule' |
Specify the minimum value that the block can output. The default value
is [] (unspecified). Simulink software uses this value to perform:
Simulation range checking (see Specify Signal Ranges)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
OutMin |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the maximum value that the block can output. The default value
is [] (unspecified). Simulink software uses this value to perform:
Simulation range checking (see Specify Signal Ranges)
Automatic scaling of fixed-point data types
Programmatic Use
Block Parameter:
OutMax |
| Type: character vector |
| Values: scalar |
Default:
'[]' |
Specify the multiplicand data type. You can set this parameter to:
A rule that inherits a data type, for example,
Inherit: Same as inputA built-in data type, for example,
int8A data type object, for example, a
Simulink.NumericTypeobjectAn expression that evaluates to a data type, for example,
fixdt(1,16,0)
The Data Type Assistant helps you set data
attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant.
. For more information, see Specify Data Types Using Data Type Assistant.
Dependencies
To enable this parameter, set the Filter
structure to Direct form I
transposed
Programmatic Use
Block Parameter:
MultiplicandDataTypeStr |
| Type: character vector |
Values:
'Inherit: Same as input' | 'int8' | 'int16' | 'int32' |
'int64' | 'fixdt(1,16,0)' | '<data type
expression>' |
Default:
'Inherit: Same as input' |
Select to lock data type settings of this block against changes by the Fixed-Point Tool and the Fixed-Point Advisor. For more information, see Lock the Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
Block Parameter:
LockScale |
Values:
'off' | 'on' |
Default:
'off' |
Specify the rounding mode for fixed-point operations. For more information, see Rounding Modes (Fixed-Point Designer).
Programmatic Use
Block
Parameter:
RndMeth |
| Type: character vector |
Values:
'Ceiling' | 'Convergent' | 'Floor' |
'Nearest' | 'Round' | 'Simplest' |
'Zero' |
Default:
'Floor' |
Specify whether overflows saturate or wrap.
on— Overflows saturate to either the minimum or maximum value that the data type can represent.off— Overflows wrap to the appropriate value that the data type can represent.
For example, the maximum value that the signed 8-bit integer int8
can represent is 127. Any block operation result greater than this maximum value causes
overflow of the 8-bit integer.
With this parameter selected, the block output saturates at 127. Similarly, the block output saturates at a minimum output value of -128.
With this parameter cleared, the software interprets the overflow-causing value as
int8, which can produce an unintended result. For example, a block result of 130 (binary 1000 0010) expressed asint8is -126.
Tips
Consider selecting this parameter when your model has a possible overflow and you want explicit saturation protection in the generated code.
Consider clearing this parameter when you want to optimize efficiency of your generated code. Clearing this parameter also helps you to avoid overspecifying how a block handles out-of-range signals. For more information, see Troubleshoot Signal Range Errors.
When you select this parameter, saturation applies to every internal operation on the block, not just the output or result.
In general, the code generation process can detect when overflow is not possible. In this case, the code generator does not produce saturation code.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
| Parameter: | SaturateOnIntegerOverflow |
| Values: | 'off' (default) | 'on' |
State Attributes
Assign a unique name to each state. If this field is blank ('
'), no name assignment occurs.
To assign a name to a single state, enter the name between quotes, for example,
'position'.To assign names to multiple states, enter a comma-delimited list surrounded by braces, for example,
{'a', 'b', 'c'}. Each name must be unique.To assign state names with a variable in the MATLAB® workspace, enter the variable without quotes. A variable can be a character vector, cell array, or structure.
Limitations
The state names apply only to the selected block.
The number of states must divide evenly among the number of state names.
You can specify fewer names than states, but you cannot specify more names than states.
For example, you can specify two names in a system with four states. The first name applies to the first two states and the second name to the last two states.
Dependencies
To enable this parameter, set Filter
structure to Direct form
II.
Programmatic Use
Block Parameter:
StateName |
| Type: character vector |
Values:
' ' | user-defined |
Default:
' ' |
Select this check box to require that the state name resolves to a Simulink signal object.
Dependencies
To enable this parameter, set Filter
structure to Direct form
II and specify a value for State
name. This parameter appears only if you set the
model configuration parameter Signal resolution
to a value other than None.
Programmatic Use
Block Parameter:
StateMustResolveToSignalObject |
| Type: character vector |
Values:
'off' | 'on' |
Default:
'off' |
Block Characteristics
More About
Extended Capabilities
This block only supports signed fixed-point data types.
The Discrete Filter block accepts and outputs real and complex signals of any signed numeric data type that Simulink supports. The block supports the same types for the numerator and denominator coefficients.
Numerator and denominator coefficients must have the same complexity. They can have different word lengths and fraction lengths.
The following diagrams show the filter structure and the data types used within the Discrete Filter block for fixed-point signals.
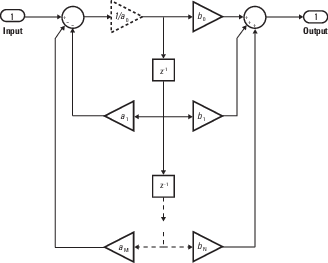
The block omits the dashed divide when you select the Optimize by skipping divide by leading denominator coefficient (a0) parameter.

Version History
Introduced before R2006aSee Also
Blocks
- Discrete FIR Filter | Allpole Filter (DSP System Toolbox) | Digital Filter Design (DSP System Toolbox)
Functions
dsp.IIRFilter(DSP System Toolbox) |dsp.AllpoleFilter(DSP System Toolbox)
Topics
- Sample- and Frame-Based Concepts (DSP System Toolbox)
- Working with States