findchangepts
Find abrupt changes in signal
Syntax
Description
ipt = findchangepts(x)x changes most significantly.
If
xis a vector with N elements, thenfindchangeptspartitionsxinto two regions,x(1:ipt-1)andx(ipt:N), that minimize the sum of the residual (squared) error of each region from its local mean.If
xis an M-by-N matrix, thenfindchangeptspartitionsxinto two regions,x(1:M,1:ipt-1)andx(1:M,ipt:N), returning the column index that minimizes the sum of the residual error of each region from its local M-dimensional mean.
ipt = findchangepts(x,Name,Value)
findchangepts(___) without output arguments plots
the signal and any detected changepoints. For more information, see Statistic.
Note
Before plotting, the findchangepts function clears (clf) the current figure. To plot the signal
and detected changepoints in a subplot, use a plotting function. See Audio File Segmentation.
Examples
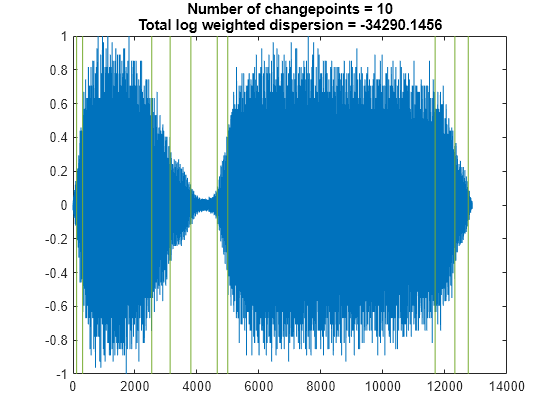
Load a data file containing a recording of a train whistle sampled at 8192 Hz. Find the 10 points at which the root-mean-square level of the signal changes most significantly.
load train findchangepts(y,MaxNumChanges=10,Statistic="rms")
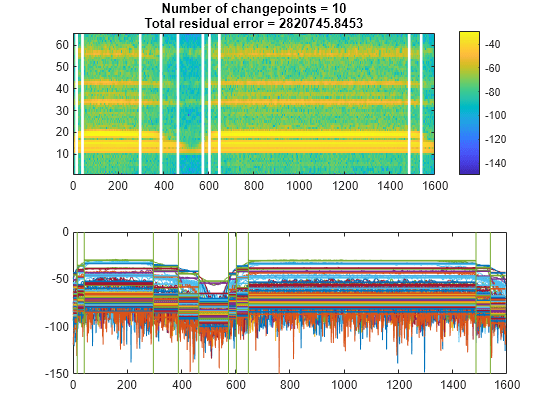
Compute the short-time power spectral density of the signal. Divide the signal into 128-sample segments and window each segment with a Hamming window. Specify 120 samples of overlap between adjoining segments and 128 DFT points. Find the 10 points at which the mean of the power spectral density changes the most significantly.
[s,f,t,pxx] = spectrogram(y,128,120,128,Fs); findchangepts(pow2db(pxx),MaxNumChanges=10)
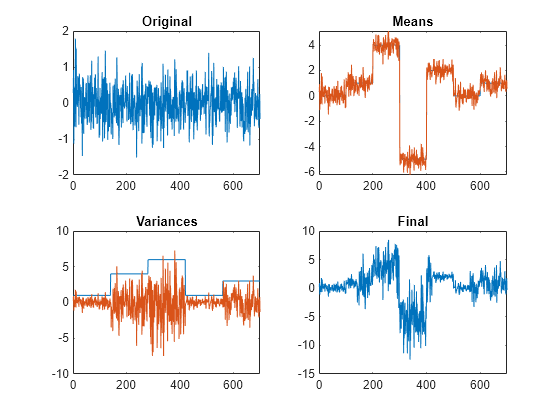
Reset the random number generator for reproducible results. Generate a random signal where:
The mean is constant in each of seven regions and changes abruptly from region to region.
The variance is constant in each of five regions and changes abruptly from region to region.
rng("default")
lr = 20;
mns = [0 1 4 -5 2 0 1];
nm = length(mns);
vrs = [1 4 6 1 3];
nv = length(vrs);
v = randn(1,lr*nm*nv)/2;
f = reshape(repmat(mns,lr*nv,1),1,lr*nm*nv);
y = reshape(repmat(vrs,lr*nm,1),1,lr*nm*nv);
t = v.*y+f;Plot the signal, highlighting the steps of its construction.
subplot(2,2,1) plot(v) title("Original") xlim([0 700]) subplot(2,2,2) plot([f;v+f]') title("Means") xlim([0 700]) subplot(2,2,3) plot([y;v.*y]') title("Variances") xlim([0 700]) subplot(2,2,4) plot(t) title("Final") xlim([0 700])
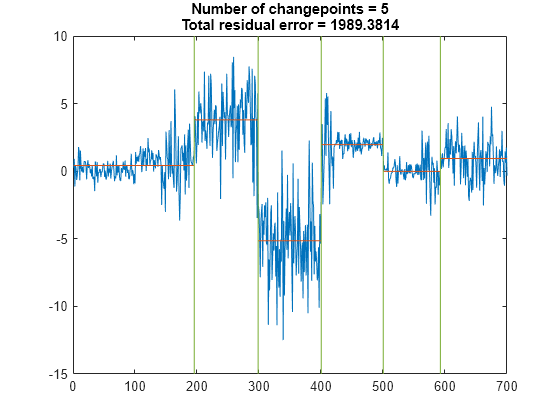
Find the five points where the mean of the signal changes most significantly.
figure findchangepts(t,MaxNumChanges=5)
Find the five points where the root-mean-square level of the signal changes most significantly.
findchangepts(t,MaxNumChanges=5,Statistic="rms")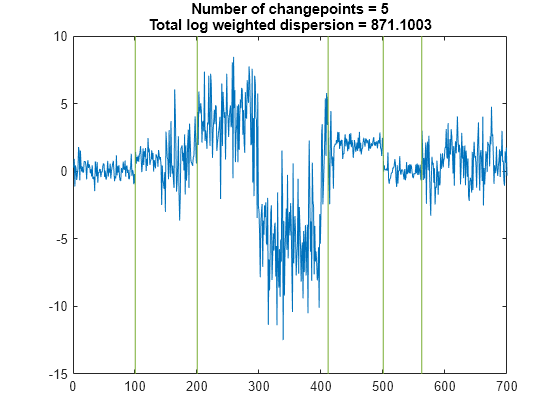
Find the point where the mean and standard deviation of the signal change the most.
findchangepts(t,Statistic="std")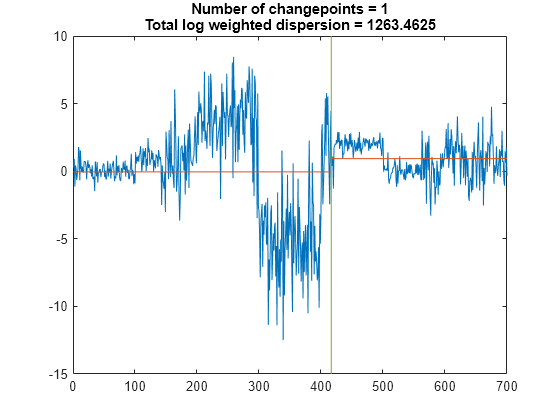
Load a speech signal sampled at . The file contains a recording of a female voice saying the word "MATLAB®."
load mtlbDiscern the vowels and consonants in the word by finding the points at which the variance of the signal changes significantly. Limit the number of changepoints to five.
numc = 5;
[q,r] = findchangepts(mtlb,Statistic="rms",MaxNumChanges=numc);Create a signal mask for the speech signal based on the changepoint indices. See signalMask for more information about using a signal mask.
t = (0:length(mtlb)-1)/Fs; roitable = ([[1;q] [q;length(mtlb)]]); x = ["M" "A" "T" "L" "A" "B"]'; c = categorical(x,unique(x,"stable")); msk = signalMask(table(t(roitable),c),SampleRate=Fs,RightShortening=1); roimask(msk)
ans=6×2 table
Var1 c
___________________ _
0 0.017525 M
0.01766 0.10461 A
0.10475 0.22162 T
0.22176 0.33675 L
0.33688 0.46535 A
0.46549 0.53909 B
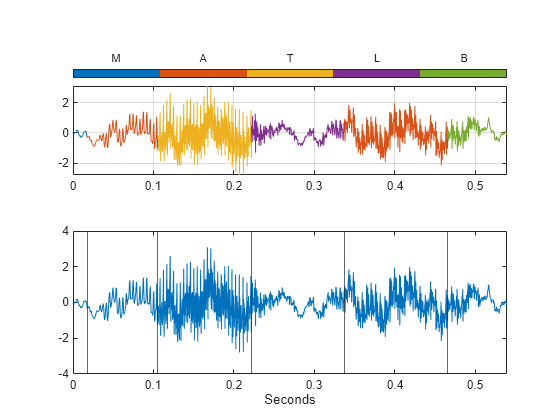
Plot the speech signal and detected changepoints in a subplot along with the regions of interest from the signal mask:
In the upper subplot, use the
plotsigroifunction to visualize the signal mask regions. Adjust the settings to make the colorbar appear at the top..In the lower subplot, plot the original speech signal and add the detected changepoints as vertical lines.
subplot(2,1,1) plotsigroi(msk,mtlb) colorbar("off") nc = numel(c)-1; colormap(gca,lines(nc)); colorbar(TickLabels=categories(c),Ticks=1/2/nc:1/nc:1, ... TickLength=0,Location="northoutside") xlabel("") subplot(2,1,2) plot(t,mtlb) hold on xline(q/Fs) hold off xlim([0 t(end)]) xlabel("Seconds")
To play the sound with a pause after each of the segments, uncomment these lines.
% for k = 1:length(roitable) % intv = roitable(k,1):roitable(k,2); % soundsc(mtlb(intv).*hann(length(intv)),Fs) % pause(.5) % end
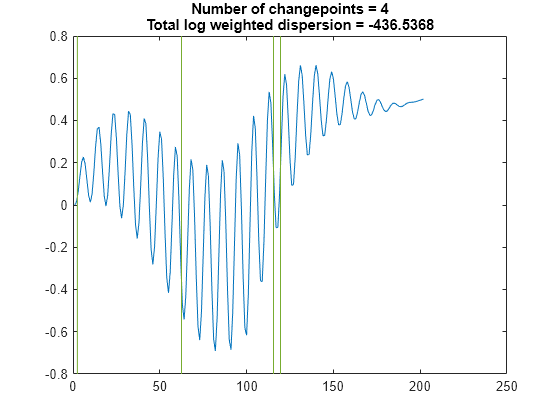
Create a signal that consists of two sinusoids with varying amplitude and a linear trend.
vc = sin(2*pi*(0:201)/17).*sin(2*pi*(0:201)/19).* ...
[sqrt(0:0.01:1) (1:-0.01:0).^2]+(0:201)/401;Find the points where the signal mean changes most significantly. The 'Statistic' name-value argument is optional in this case. Specify a minimum residual error improvement of 1.
findchangepts(vc,'Statistic','mean','MinThreshold',1)
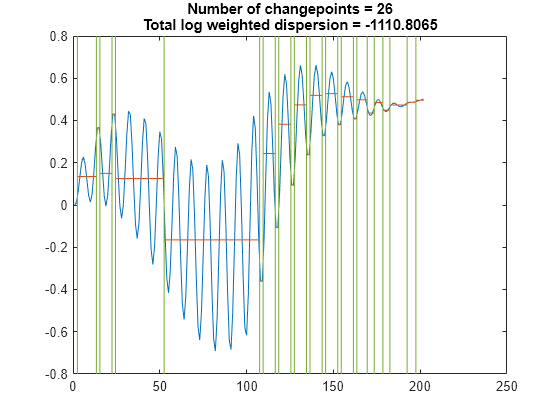
Find the points where the root-mean-square level of the signal changes the most. Specify a minimum residual error improvement of 6.
findchangepts(vc,'Statistic','rms','MinThreshold',6)
Find the points where the standard deviation of the signal changes most significantly. Specify a minimum residual error improvement of 10.
findchangepts(vc,'Statistic','std','MinThreshold',10)
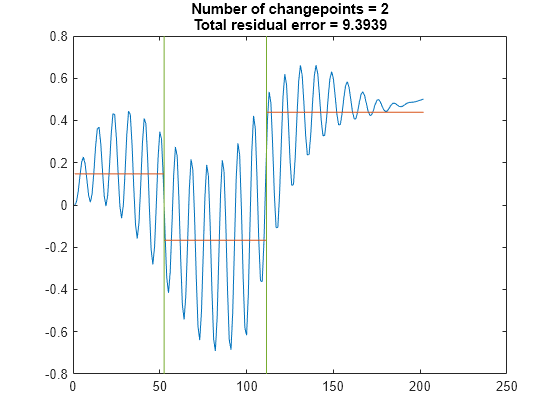
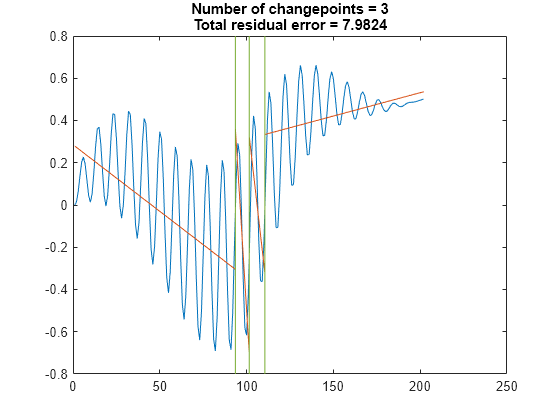
Find the points where the mean and the slope of the signal change most abruptly. Specify a minimum residual error improvement of 0.6.
findchangepts(vc,'Statistic','linear','MinThreshold',0.6)
Generate a two-dimensional, 1000-sample Bézier curve with 20 random control points. A Bézier curve is defined by:
,
where is the th of control points, ranges from 0 to 1, and is a binomial coefficient. Plot the curve and the control points.
m = 20;
P = randn(m,2);
t = linspace(0,1,1000)';
pol = t.^(0:m-1).*(1-t).^(m-1:-1:0);
bin = gamma(m)./gamma(1:m)./gamma(m:-1:1);
crv = bin.*pol*P;
plot(crv(:,1),crv(:,2),P(:,1),P(:,2),"o:")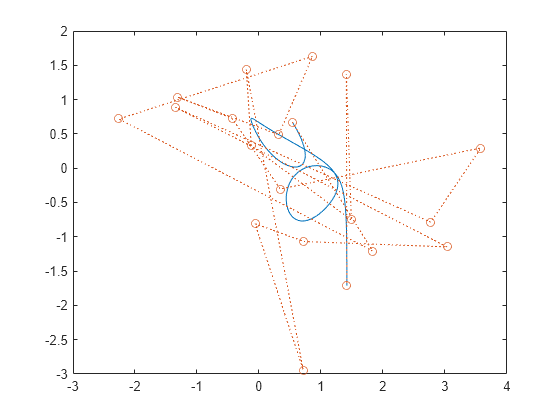
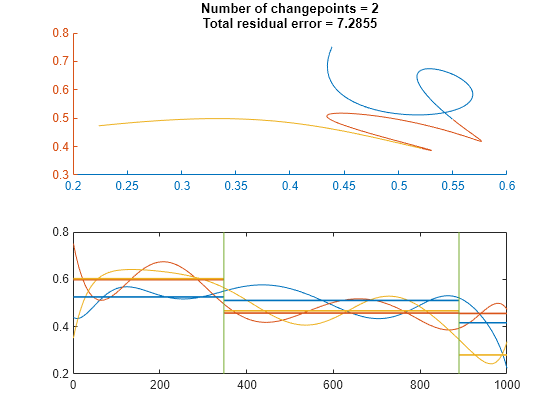
Partition the curve into three segments, such that the points in each segment are at a minimum distance from the segment mean.
findchangepts(crv',MaxNumChanges=3)
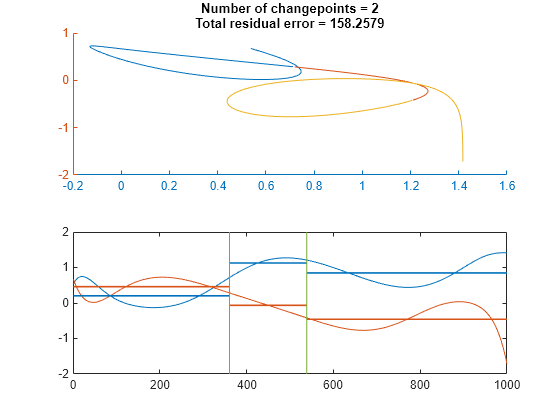
Partition the curve into 20 segments that are best fit by straight lines.
findchangepts(crv',Statistic="linear",MaxNumChanges=19)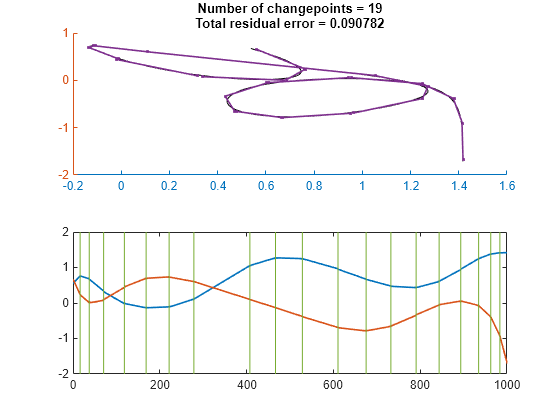
Generate and plot a three-dimensional Bézier curve with 20 random control points.
P = rand(m,3); crv = bin.*pol*P; plot3(crv(:,1),crv(:,2),crv(:,3),P(:,1),P(:,2),P(:,3),"o:") xlabel("x") ylabel("y")
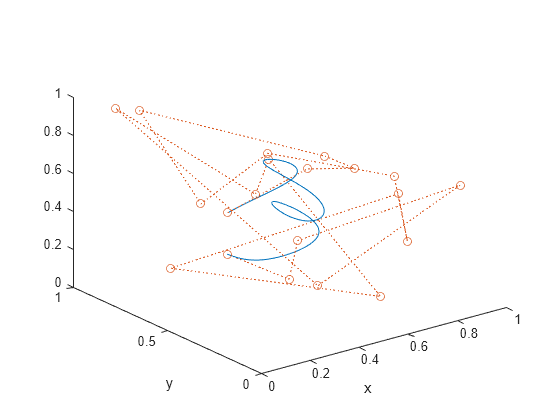
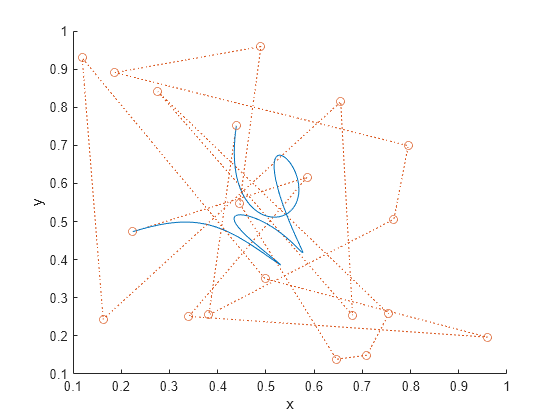
Visualize the curve from above.
view([0 0 1])
Partition the curve into three segments, such that the points in each segment are at a minimum distance from the segment mean.
findchangepts(crv',MaxNumChanges=3)
Partition the curve into 20 segments that are best fit by straight lines.
findchangepts(crv',Statistic="linear",MaxNumChanges=19)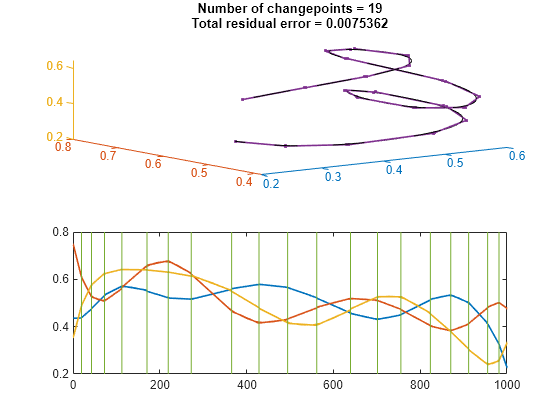
Input Arguments
Name-Value Arguments
Output Arguments
More About
References
[1] Killick, Rebecca, Paul Fearnhead, and Idris A. Eckley. “Optimal detection of changepoints with a linear computational cost.” Journal of the American Statistical Association. Vol. 107, No. 500, 2012, pp. 1590–1598.
[2] Lavielle, Marc. “Using penalized contrasts for the change-point problem.” Signal Processing. Vol. 85, August 2005, pp. 1501–1510.
Extended Capabilities
Version History
Introduced in R2016a