cusum
Detect small changes in mean using cumulative sum
Syntax
Description
[
returns the first index of the upper and lower cumulative sums of
iupper,ilower] = cusum(x)x that have drifted beyond five standard deviations
above and below a target mean, respectively. The minimum detectable mean shift
is one standard deviation. The function estimates the target mean and standard
deviations from the first 25 samples of x.
[ returns
all the indices at which the upper and lower cumulative sums exceed
the control limit.iupper,ilower] = cusum(___,'all')
[ also returns the upper and lower
cumulative sums.iupper,ilower,uppersum,lowersum]
= cusum(___)
cusum(___) with no output arguments
plots the upper and lower cumulative sums normalized to one standard
deviation above and below the target mean.
Examples
Generate and plot a 100-sample random signal with a linear trend. Reset the random number generator for reproducible results.
rng('default')
rnds = rand(1,100);
trnd = linspace(0,1,100);
fnc = rnds + trnd;
plot(fnc)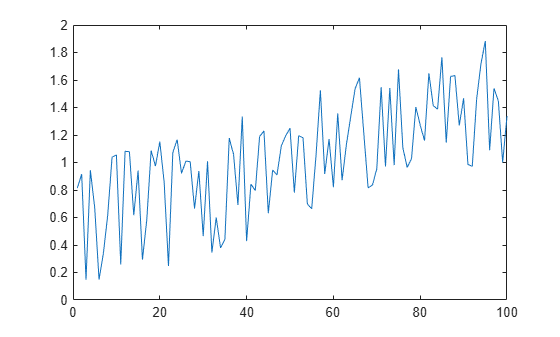
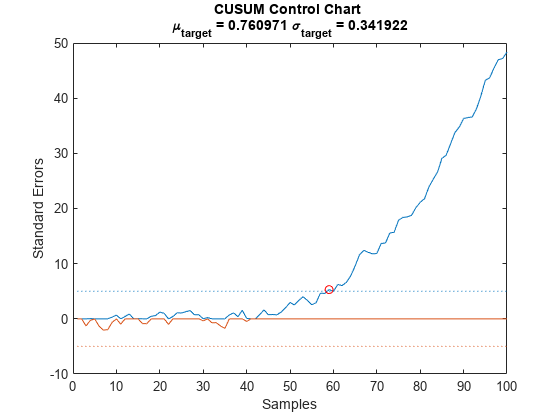
Apply cusum to the function using the default values of the input arguments.
cusum(fnc)
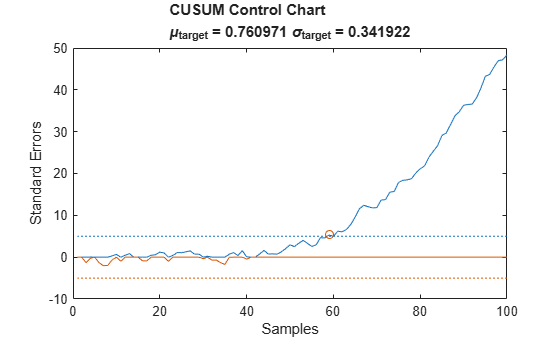
Compute the mean and standard deviation of the first 25 samples. Apply cusum using these numbers as the target mean and the target standard deviation. Highlight the point where the cumulative sum drifts more than five standard deviations beyond the target mean. Set the minimum detectable mean shift to one standard deviation.
mfnc = mean(fnc(1:25)); sfnc = std(fnc(1:25)); cusum(fnc,5,1,mfnc,sfnc)
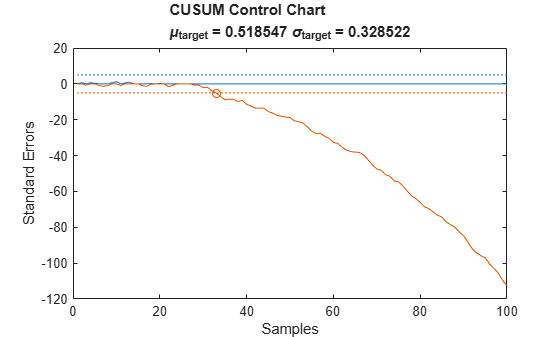
Repeat the calculation using a negative linear trend.
nnc = rnds - trnd; cusum(nnc)
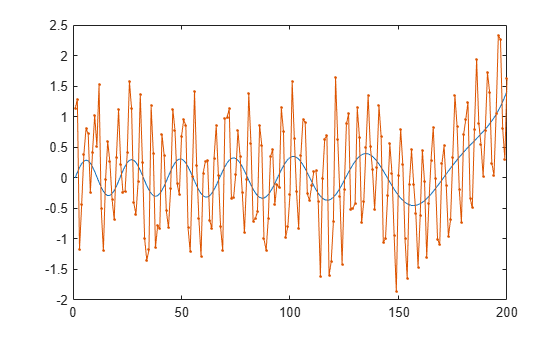
Generate a signal resembling motion about an axle that becomes unstable due to wear. Add white Gaussian noise of variance 1/9. Reset the random number generator for reproducible results.
rng default
sz = 200;
dr = airy(2,linspace(-14.9371,1.2,sz));
rd = dr + sin(2*pi*(1:sz)/5) + randn(1,sz)/3;Plot the growing background drift and the resulting signal.
plot(dr) hold on plot(rd,'.-') hold off
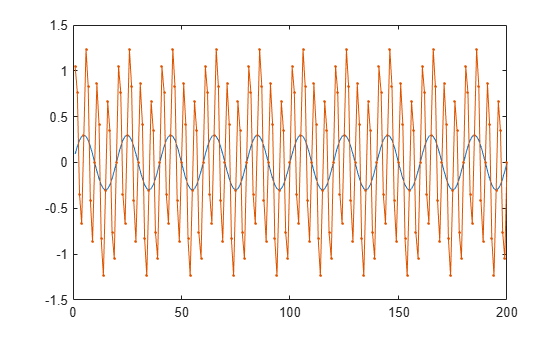
Find the mean and standard deviation if the drift is not present and there is no noise. Plot the ideal noiseless signal and its stable background.
id = 0.3*sin(2*pi*(1:sz)/20); st = id + sin(2*pi*(1:sz)/5); mf = mean(st)
mf = -3.8212e-16
sf = std(st)
sf = 0.7401
plot(id) hold on plot(st,'.-') hold off
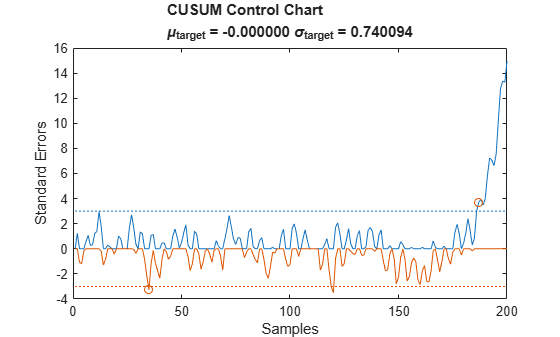
Use the CUSUM control chart to pinpoint the onset of instability. Assume that the system becomes unstable when the signal is three standard deviations beyond its ideal behavior. Specify a minimum detectable shift of one standard deviation.
cusum(rd,3,1,mf,sf)
Make the violation criterion more strict by increasing the minimum detectable shift. Return all instances of unwanted drift.
cusum(rd,3,1.2,mf,sf,'all')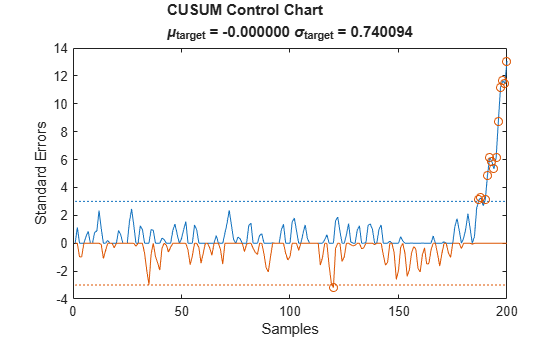
Every hole in golf has an associated "par" that indicates the expected number of strokes needed to sink the ball. Skilled players usually complete each hole with a number of strokes very close to par. It is necessary to play several holes and let scores accumulate before a clear winner emerges in a match.
Ben, Jen, and Ken play a full round, which consists of 18 holes. The course has an assortment of par-3, par-4, and par-5 holes. At the end of the game, the players tabulate their scores.
hole = 1:18;
par = [4 3 5 3 4 5 3 4 4 4 5 3 5 4 4 4 3 4];
nms = {'Ben';'Jen';'Ken'};
Ben = [4 3 4 2 3 5 2 3 3 4 3 2 3 3 3 3 2 3];
Jen = [4 3 4 3 4 4 3 4 4 4 5 3 4 4 5 5 3 3];
Ken = [4 3 4 3 5 5 4 4 4 4 5 3 5 4 5 4 3 5];
T = table(hole',par',Ben',Jen',Ken', ...
'VariableNames',['hole';'par';nms])T=18×5 table
hole par Ben Jen Ken
____ ___ ___ ___ ___
1 4 4 4 4
2 3 3 3 3
3 5 4 4 4
4 3 2 3 3
5 4 3 4 5
6 5 5 4 5
7 3 2 3 4
8 4 3 4 4
9 4 3 4 4
10 4 4 4 4
11 5 3 5 5
12 3 2 3 3
13 5 3 4 5
14 4 3 4 4
15 4 3 5 5
16 4 3 5 4
⋮
The winner of the round is the player whose lower cumulative sum drifts the most below par at the end. Compute the sums for the three players to determine the winner. Make every shift in mean detectable by setting a small threshold.
[~,b,~,Bensum] = cusum(Ben-par,1,1e-4,0); [~,j,~,Jensum] = cusum(Jen-par,1,1e-4,0); [~,k,~,Kensum] = cusum(Ken-par,1,1e-4,0); plot([Bensum;Jensum;Kensum]') legend(nms,'Location','best')
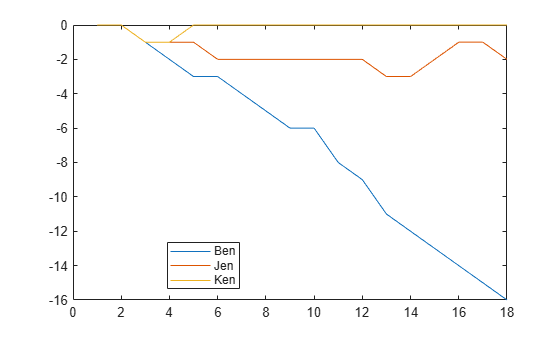
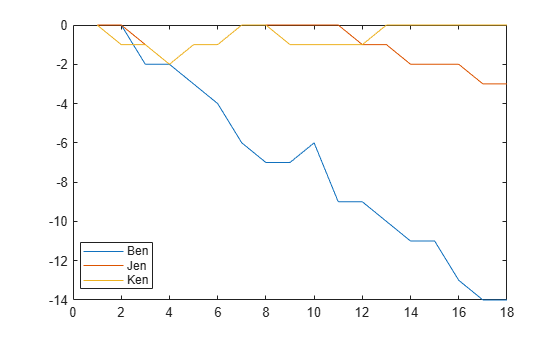
Ben wins the round. Simulate their next game by adding or subtracting a stroke per hole at random.
Ben = Ben+randi(3,1,18)-2; Jen = Jen+randi(3,1,18)-2; Ken = Ken+randi(3,1,18)-2; [~,b,~,Bensum] = cusum(Ben-par,1,1e-4,0); [~,j,~,Jensum] = cusum(Jen-par,1,1e-4,0); [~,k,~,Kensum] = cusum(Ken-par,1,1e-4,0); plot([Bensum;Jensum;Kensum]') legend(nms,'Location','best')
Input Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2016a