dct
Discrete cosine transform
Description
y = dct(___,Type=dcttype)
Examples
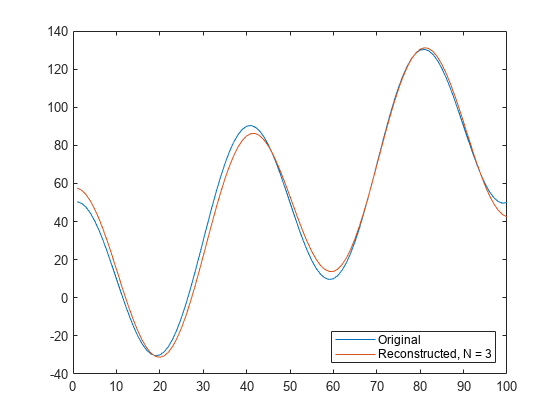
Find how many DCT coefficients represent 99% of the energy in a sequence.
x = (1:100) + 50*cos((1:100)*2*pi/40).^3; X = dct(x); [XX,ind] = sort(abs(X),"descend"); i = 1; while (norm(X(ind(1:i)))/norm(X))^2 < 0.99 i = i + 1; end needed = i;
Reconstruct the signal and compare it to the original signal.
X(ind(needed+1:end)) = 0; xx = idct(X); plot([x;xx]') legend("Original","Reconstructed, N = " + needed, ... Location='SouthEast')
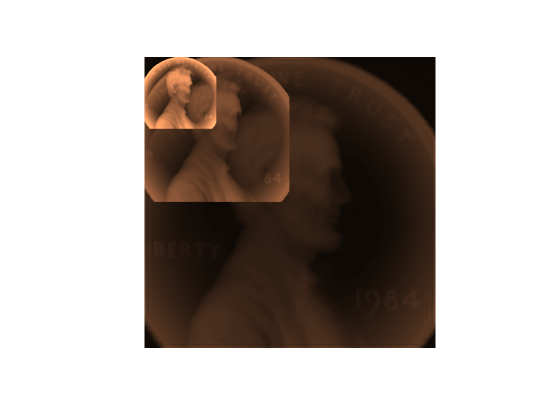
Load a file that contains depth measurements of a mold used to mint a United States penny. The data, taken at the National Institute of Standards and Technology, are sampled on a 128-by-128 grid. Display the data.
load penny surf(P) view(2) colormap copper shading interp axis ij square off

Compute the discrete cosine transform of the image data. Operate first along the rows and then along the columns.
Q = dct(P,[],1); R = dct(Q,[],2);
Find what fraction of DCT coefficients contain 99.98% of the energy in the image.
X = R(:); [~,ind] = sort(abs(X),"descend"); coeffs = 1; while (norm(X(ind(1:coeffs)))/norm(X))^2 < 0.9998 coeffs = coeffs + 1; end disp(coeffs + " of " + numel(R) + " coefficients are sufficient")
5215 of 16384 coefficients are sufficient
Reconstruct the image using only the necessary coefficients.
R(abs(R) < abs(X(ind(coeffs)))) = 0; S = idct(R,[],2); T = idct(S,[],1);
Display the reconstructed image.
surf(T) view(2) shading interp axis ij square off

Load a file that contains depth measurements of a mold used to mint a United States penny. The data, taken at the National Institute of Standards and Technology, are sampled on a 128-by-128 grid. Display the data.
load penny surf(P) colormap copper shading interp view(2) axis ij square off

Compute the discrete cosine transform of the image data using the DCT-1 variant. Operate first along the rows and then along the columns.
Q = dct(P,[],1,Type=1); R = dct(Q,[],2,Type=1);
Invert the transform. Truncate the inverse so that each dimension of the reconstructed image is one-half the length of the original.
S = idct(R,size(P,2)/2,2,Type=1); T = idct(S,size(P,1)/2,1,Type=1);
Invert the transform again. Zero-pad the inverse so that each dimension of the reconstructed image is twice the length of the original.
U = idct(R,size(P,2)*2,2,Type=1); V = idct(U,size(P,1)*2,1,Type=1);
Display the original and reconstructed images.
surf(V) hold on surf(P) surf(T) hold off shading interp view(2) axis ij equal off
Input Arguments
Output Arguments
More About
References
[1] Jain, A. K. Fundamentals of Digital Image Processing. Englewood Cliffs, NJ: Prentice-Hall, 1989.
[2] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
[3] Pennebaker, W. B., and J. L. Mitchell. JPEG Still Image Data Compression Standard. New York: Van Nostrand Reinhold, 1993.
Extended Capabilities
Version History
Introduced before R2006a