Receiver
Receiver object belonging to satellite scenario
Description
The Receiver object defines a receiver object function
belonging to the satellite scenario.
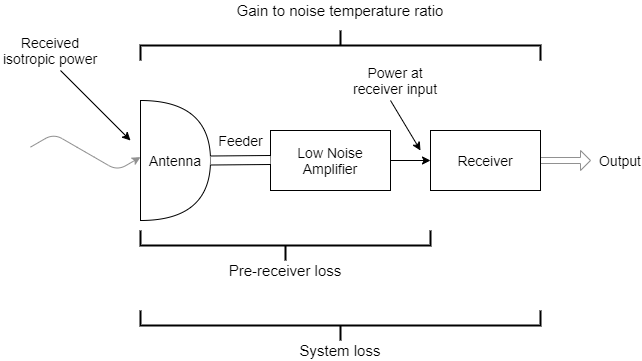
For an illustration of the signal power and various losses encountered at a receiver, see Algorithms.
Creation
You can create Receiver object using the receiver object
function of the Satellite, GroundStation,
Platform, or
Gimbal
object.
Properties
Object Functions
aer | Calculate azimuth angle, elevation angle, and range of another satellite or ground station in NED frame |
gaussianAntenna | Add Gaussian antennas |
pattern | Plot 3-D radiation pattern of antenna |
pointAt | Point transmitter or receiver at target |
coordinateAxes | Visualize coordinate axes triad of satellite scenario assets |
Examples
Create a satellite scenario object.
startTime = datetime(2020,11,25,0,0,0);
stopTime = startTime + days(1);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime)sc =
satelliteScenario with properties:
StartTime: 25-Nov-2020
StopTime: 26-Nov-2020
SampleTime: 60
AutoSimulate: 1
Satellites: [1×0 matlabshared.satellitescenario.Satellite]
GroundStations: [1×0 matlabshared.satellitescenario.GroundStation]
Platforms: [1×0 matlabshared.satellitescenario.Platform]
Viewers: [0×0 matlabshared.satellitescenario.Viewer]
AutoShow: 1
Add a satellite to the scenario.
semiMajorAxis = 10000000; % meters eccentricity = 0; inclination = 60; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 0; % degrees sat = satellite(sc,semiMajorAxis,eccentricity,inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly,Name="Satellite");
Add gimbals to the satellite. These gimbals enable the satellite receiver antenna to steer to the first ground station, and its transmitter antenna to steer to the second ground station.
gimbalrxSat = gimbal(sat); gimbaltxSat = gimbal(sat);
Add a receiver to the first gimbal of the satellite.
gainToNoiseTemperatureRatio = 5; % dB/K systemLoss = 3; % dB rxSat = receiver(gimbalrxSat,Name="Satellite Receiver",GainToNoiseTemperatureRatio= ... gainToNoiseTemperatureRatio,SystemLoss=systemLoss)
rxSat =
Receiver with properties:
Name: Satellite Receiver
ID: 4
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
Antenna: [1x1 satcom.satellitescenario.GaussianAntenna]
SystemLoss: 3 decibels
PreReceiverLoss: 3 decibels
GainToNoiseTemperatureRatio: 5 decibels/Kelvin
RequiredEbNo: 10 decibels
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Add a transmitter to the second gimbal of the satellite.
frequency = 27e9; % Hz power = 20; % dBW bitRate = 20; % Mbps systemLoss = 3; % dB txSat = transmitter(gimbaltxSat,Name="Satellite Transmitter",Frequency=frequency, ... power=power,BitRate=bitRate,SystemLoss=systemLoss)
txSat =
Transmitter with properties:
Name: Satellite Transmitter
ID: 5
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
Antenna: [1x1 satcom.satellitescenario.GaussianAntenna]
SystemLoss: 3 decibels
Frequency: 2.7e+10 Hertz
BitRate: 20 Mbps
Power: 20 decibel-watts
Links: [1x0 satcom.satellitescenario.Link]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Specify the antenna specifications of the repeater.
dishDiameter = 0.5; % meters
apertureEfficiency = 0.5;
gaussianAntenna(txSat,DishDiameter=dishDiameter,ApertureEfficiency=apertureEfficiency);
gaussianAntenna(rxSat,DishDiameter=dishDiameter,ApertureEfficiency=apertureEfficiency);Add two ground stations to the scenario.
gs1 = groundStation(sc,Name="Ground Station 1"); latitude = 52.2294963; % degrees longitude = 0.1487094; % degrees gs2 = groundStation(sc,latitude,longitude,Name="Ground Station 2");
Point gimbals of the satellite towards the two ground stations for the simulation duration.
pointAt(gimbaltxSat,gs2); pointAt(gimbalrxSat,gs1);
Add gimbals to the ground stations. These gimbals enable the ground station antennas to steer towards the satellite.
gimbalgs1 = gimbal(gs1); gimbalgs2 = gimbal(gs2);
Add a transmitter to ground station gs1.
frequency = 30e9; % Hz power = 40; % dBW bitRate = 20; % Mbps txGs1 = transmitter(gimbalgs1,Name="Ground Station 1 Transmitter",Frequency=frequency, ... Power=power,BitRate=bitRate);
Add a receiver to ground station gs2.
requiredEbNo = 14; % dB rxGs2 = receiver(gimbalgs2,Name="Ground Station 2 Receiver",RequiredEbNo=requiredEbNo);
Define the antenna specifications of the ground stations.
dishDiameter = 5; % meters
gaussianAntenna(txGs1,DishDiameter=dishDiameter);
gaussianAntenna(rxGs2,DishDiameter=dishDiameter);Point gimbals of the ground stations towards the satellite for the simulation duration.
pointAt(gimbalgs1,sat); pointAt(gimbalgs2,sat);
Add link analysis to transmitter txGs1.
lnk = link(txGs1,rxSat,txSat,rxGs2)
lnk =
Link with properties:
Sequence: [10 4 5 11]
LineWidth: 2
LineColor: [0.3922 0.8314 0.0745]
Determine the times when ground station gs1 can send data to ground station gs2 via the satellite.
linkIntervals(lnk)
ans=4×8 table
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 1 25-Nov-2020 00:20:00 25-Nov-2020 00:40:00 1200 NaN NaN
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 2 25-Nov-2020 03:19:00 25-Nov-2020 03:36:00 1020 NaN NaN
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 3 25-Nov-2020 06:15:00 25-Nov-2020 06:36:00 1260 NaN NaN
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 4 25-Nov-2020 22:20:00 25-Nov-2020 22:38:00 1080 NaN NaN
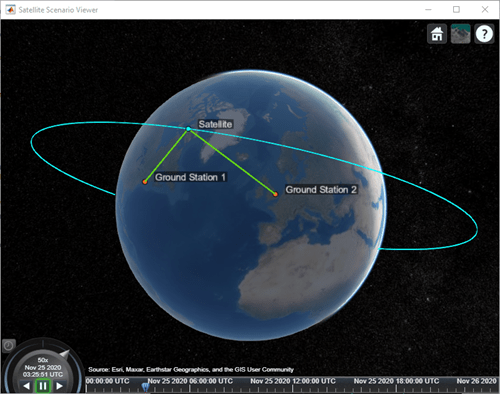
Visualize the link by using the Satellite Scenario Viewer.
play(sc);
Algorithms
This diagram shows the received power and the signal losses experienced by a receiver.