ureal
Uncertain real parameter
Description
Use the ureal uncertain element to represent real numbers whose
values are uncertain when modeling dynamic systems with uncertainty. An uncertain real
parameter has a nominal value, stored in the NominalValue property, and an
uncertainty, which is the potential deviation from the nominal value. ureal
stores this deviation equivalently in three different properties:
PlusMinus— The additive relative deviation fromNominalValueRange— The absolute range of values, expressed as an interval containingNominalValuePercentage— The deviation, expressed as a percentage ofNominalValue
When you create an uncertain real parameter, you can specify the uncertainty in any of
these three ways. The ureal object automatically calculates the appropriate
values for the other two properties.
You can combine ureal uncertain parameters with numeric parameters to
create uncertain matrices (umat objects) which you can then use to create
uncertain state-space models. Or, you can use them as coefficients in transfer functions. When
you use uncertain real parameters to build uncertain dynamic systems, the result is an
uncertain model such as a uss or genss model.
Creation
Syntax
Description
p = ureal(
creates an uncertain real parameter with the specified nominal value and an uncertainty of
±1. This syntax sets the name,nominalvalue)Name and NominalValue
properties of the resulting ureal object.
p = ureal(
sets the uncertainty to the specified deviations from the nominal value.
name,nominalvalue,'PlusMinus',plusminus)plusminus is a two-element vector of the form
[-DL,DR]. The uncertain parameter takes values in the range
[nominalvalue-DL,nominalvalue+DR]. If the range is symmetric around
the nominal value such that DL = DR, you can use
plusminus = DR.
Using this syntax also sets the Mode property of the resulting
ureal object to 'PlusMinus'.
p = ureal(
sets the uncertainty to the specified absolute range. name,nominalvalue,'Range',range)range is a
two-element vector of the form [LOW,HIGH], and the nominal value must
fall in this range.
Using this syntax also sets the Mode property of the resulting
ureal object to 'Range'.
p = ureal(
sets the uncertainty in terms of percentage deviations from the nominal value.
name,nominalvalue,'Percentage',percentage)percentage is a two-element vector of the form
[-PL,PR]. This syntax sets the lower and upper limits of the
uncertainty range such that PL = 100*|1-LOW/nominalvalue| and
PR = 100*|1-HIGH/nominalvalue|.
Using this syntax also sets the Mode property of the resulting
ureal object to 'Percentage'.
p = ureal(
sets additional properties using name-value pairs. You can specify multiple name-value
pairs. Enclose each property name in single quotes.name,nominalvalue,___,Name,Value)
Properties
Object Functions
You can use ureal parameters with functions for creating dynamic systems
such as tf and ss. You can also combine them with
existing dynamic systems models using model arithmetic or commands such as
feedback. Doing so creates an uncertain state-space model. You can also
combine ureal parameters using common arithmetic operations, which generally
results in an uncertain matrix (umat object). Use functions such as
actual2normalized and uscale to transform or scale
the amount of uncertainty in a ureal parameter. You can also use commands
such as usample or usubs to replace real parameters
with fixed values. The gridureal command evaluates a
ureal parameter over its range and returns a grid of sampled values.
The following list contains a representative subset of the functions you can use with
ureal parameter objects.
actual2normalized | Transform actual values to normalized values |
append | Group models by appending their inputs and outputs |
feedback | Feedback connection of multiple models |
get | Access model property values |
getLimits | Validity range for uncertain real (ureal)
parameters |
getNominal | Nominal value of uncertain model |
gridureal | Grid ureal parameters uniformly over their range |
isuncertain | Check whether argument is uncertain class type |
normalized2actual | Convert value for atom in normalized coordinates to corresponding actual value |
replaceBlock | Replace or update control design blocks in generalized model |
rsampleBlock | Randomly sample Control Design blocks in generalized model |
sampleBlock | Sample Control Design blocks in generalized model |
ss | State-space model |
tf | Transfer function model |
umat | Uncertain matrix |
usample | Generate random samples of uncertain model or element |
uscale | Scale uncertainty of block or system |
usubs | Substitute given values for uncertain elements of uncertain objects |
Examples
Create an uncertain real parameter with a nominal value of 10, and an uncertainty range of ±2. Because this uncertainty is symmetric, you can specify it by setting PlusMinus to 2, instead of explicitly setting it to [-2,2].
p1 = ureal('p1',10,'PlusMinus',2)
Uncertain real parameter "p1" with nominal value 10 and variability [-2,2]. Block Properties
Create another parameter with a nominal value of 10, this time with an asymmetric uncertainty such that the value can decrease by 2 from the nominal but can increase by 5.
p2 = ureal('p2',10,'PlusMinus',[-2 5])
Uncertain real parameter "p2" with nominal value 10 and variability [-2,5]. Block Properties
Examine the properties of the parameter. The Range and Percentage properties are automatically set to values corresponding to this variability.
get(p2)
NominalValue: 10
Mode: 'PlusMinus'
Range: [8 15]
PlusMinus: [-2 5]
Percentage: [-20 50]
AutoSimplify: 'basic'
Name: 'p2'
Because you specified PlusMinus to create the parameter, the Mode property initializes to PlusMinus. In this mode, when you change the nominal value, PlusMinus remains fixed, while Percentage and Range change to reflect the new range of values the parameter can take. See Change Nominal Value or Uncertainty of Existing Parameter.
Create an uncertain real parameter whose value can vary from 14 to 19, with a nominal value of 15.5. To do so, set the Range property to the lowest and highest values the parameter can take.
p1 = ureal('p1',15.5,'Range',[14,19])
Uncertain real parameter "p1" with nominal value 15.5 and range [14,19]. Block Properties
Examine the properties of the parameter. The PlusMinus and Percentage properties are automatically set to the corresponding values. The Mode property is set to 'Range'.
get(p1)
NominalValue: 15.5000
Mode: 'Range'
Range: [14 19]
PlusMinus: [-1.5000 3.5000]
Percentage: [-9.6774 22.5806]
AutoSimplify: 'basic'
Name: 'p1'
Create an uncertain real parameter with a nominal value of 24, whose value can increase or decrease by 15%. Because this uncertainty is symmetric, you can specify it by setting Percentage to 15, instead of explicitly setting it to [-15,15].
p1 = ureal('p1',24,'Percentage',15)
Uncertain real parameter "p1" with nominal value 24 and variability [-15,15]%. Block Properties
Create another parameter with a nominal value of 24, this time with an asymmetric uncertainty such that the value can decrease by 20% from the nominal but can increase by 15%.
p2 = ureal('p2',24,'Percentage',[-20,15])
Uncertain real parameter "p2" with nominal value 24 and variability [-20,15]%. Block Properties
Examine the properties to see the deviation from nominal (PlusMinus) and the range of values (Range) represented by these percentage variations.
get(p2)
NominalValue: 24
Mode: 'Percentage'
Range: [19.2000 27.6000]
PlusMinus: [-4.8000 3.6000]
Percentage: [-20 15]
AutoSimplify: 'basic'
Name: 'p2'
A ureal parameter stores the uncertainty as a relative deviation from nominal (PlusMinus), an absolute range of possible values (Range), and a percentage deviation from nominal (Percentage). The Mode property specifies which of these three does not change when you change the nominal value of the parameter. For instance, create a parameter with a nominal value of 10 and a relative deviation of ±2.
p1 = ureal('p1',10,'PlusMinus',[-2,2])
Uncertain real parameter "p1" with nominal value 10 and variability [-2,2]. Block Properties
Examine the values of the other properties.
get(p1)
NominalValue: 10
Mode: 'PlusMinus'
Range: [8 12]
PlusMinus: [-2 2]
Percentage: [-20 20]
AutoSimplify: 'basic'
Name: 'p1'
In PlusMinus mode, when you change the nominal value, the PlusMinus property remains fixed, and the values of the other two ways of expressing the uncertainty are updated to reflect the new values. For instance, change the nominal value to 20.
p1.NominalValue = 20; get(p1)
NominalValue: 20
Mode: 'PlusMinus'
Range: [18 22]
PlusMinus: [-2 2]
Percentage: [-10 10]
AutoSimplify: 'basic'
Name: 'p1'
The new uncertain parameter has the same PlusMinus value, but the range and percentage are adjusted to the new values that correspond to 20±2.
If you change the PlusMinus value, the Range and Percentage values are updated to reflect the new uncertainties. The nominal value is unchanged.
p1.PlusMinus = [-4 4]; get(p1)
NominalValue: 20
Mode: 'PlusMinus'
Range: [16 24]
PlusMinus: [-4 4]
Percentage: [-20 20]
AutoSimplify: 'basic'
Name: 'p1'
Next, change the parameter to Range mode. In this mode, when you change the nominal value, Range remains fixed at [16 24], while Percentage and PlusMinus are updated.
p1.Mode = 'Range';
p1.NominalValue = 22;
get(p1) NominalValue: 22
Mode: 'Range'
Range: [16 24]
PlusMinus: [-6 2]
Percentage: [-27.2727 9.0909]
AutoSimplify: 'basic'
Name: 'p1'
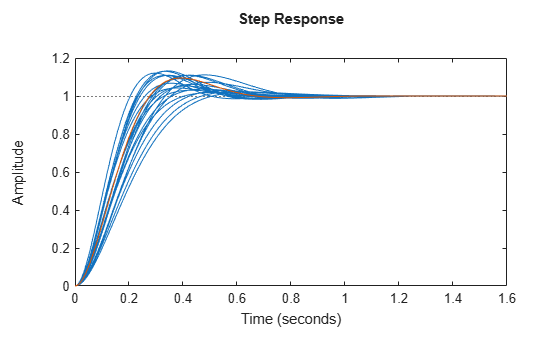
Create a model of a second-order system with natural frequency of = 10±3 rad/s and a damping ratio that can vary from 0.5 to 0.8, with a nominal value of ζ = 0.6.
First, represent the natural frequency and damping ratio values as uncertain real parameters.
w0 = ureal('w0',10,'PlusMinus',[-3 3]); zeta = ureal('zeta',0.6,'Range',[0.5 0.8]);
Next, use the parameters to specify the coefficients of a transfer function.
sys = tf(1,[1/w0^2 2*zeta/w0 1])
Uncertain continuous-time state-space model with 1 outputs, 1 inputs, 2 states. The model uncertainty consists of the following blocks: w0: Uncertain real, nominal = 10, variability = [-3,3], 3 occurrences zeta: Uncertain real, nominal = 0.6, range = [0.5,0.8], 1 occurrences Model Properties Type "sys.NominalValue" to see the nominal value and "sys.Uncertainty" to interact with the uncertain elements.
sys is an uncertain state-space (uss) model that depends on the uncertain parameters w0 and zeta. The model sys uses the Name property of the parameters to refer to them and track them.
Examine the step response of the system to get a sense of the responses that the uncertainty represents. The step command automatically takes a number of random samples of an uncertain system.
step(sys,sys.NominalValue)
You can use ureal parameters to specify uncertain elements in state-space matrices. For instance, create three uncertain real parameters and build state-spaces matrices from them.
p1 = ureal('p1',10,'Percentage',50); p2 = ureal('p2',3,'PlusMinus',[-.5 1.2]); p3 = ureal('p3',0); A = [-p1 p2; 0 -p1]; B = [-p2; p2+p3]; C = [1 0; 1 1-p3]; D = [0; 0];
The matrices constructed with uncertain parameters, A, B, and C, are uncertain matrix (umat) objects. Using them as inputs to ss results in a 2-output, 1-input, 2-state uncertain system.
sys = ss(A,B,C,D)
Uncertain continuous-time state-space model with 2 outputs, 1 inputs, 2 states. The model uncertainty consists of the following blocks: p1: Uncertain real, nominal = 10, variability = [-50,50]%, 2 occurrences p2: Uncertain real, nominal = 3, variability = [-0.5,1.2], 2 occurrences p3: Uncertain real, nominal = 0, variability = [-1,1], 2 occurrences Model Properties Type "sys.NominalValue" to see the nominal value and "sys.Uncertainty" to interact with the uncertain elements.
The display shows that the system includes the three uncertain parameters, referenced by the Name properties of the ureal objects you used to create the system.
Tips
urealobjects support uncertainty that is skewed, or asymmetric around the nominal value. However, highly skewed ranges can lead to poor numeric conditioning and poor results. Therefore, for meaningful results, avoid highly skewed ranges where the nominal value is orders of magnitude closer to one end of the range than to the other.When the uncertainty range of a
urealparameter is not centered at its nominal value, the parameter can take only a restricted range of values. For robust stability analysis, which sometimes requires assigning a parameter values outside the specified range, these restrictions mean that the smallest destabilizing perturbation of the parameter might be outside the actual range of values that the parameter can take. UsegetLimitsto find the restricted range of values that a skewedurealparameter can take. For more information, seegetLimits.