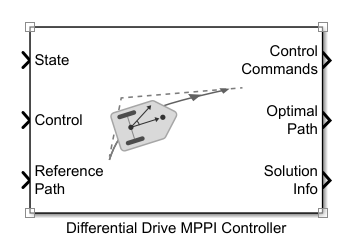
Differential Drive MPPI Controller
Control motion planning of differential drive vehicle model using Model Predictive Path Integral (MPPI)
Since R2025a
Libraries:
Offroad Autonomy Library /
Vehicle Controllers
Description
Add-On Required: This feature requires the Robotics System Toolbox Offroad Autonomy Library add-on.
The Differential Drive MPPI Controller block enables you to plan a local path for a Differential Drive Kinematic Model, following a reference path typically generated by a global path planner such as RRT* or Hybrid A*, using the model predictive path integral (MPPI) algorithm.
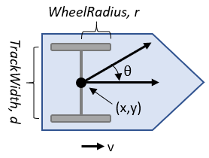
This model approximates a vehicle with single fixed axle and wheels separated by the track width specified in the Track Width parameter. Each wheel can be driven independently using speed inputs specified in the Vehicle Input Type parameter for the left and right wheels, respectively. Vehicle speed and heading are defined from the axle center.
At each state of the vehicle along the reference path, the MPPI controller samples potential trajectories for a short segment along the reference path, based on the current state and control of the vehicle. The controller evaluates these trajectories using a cost function to smooth the path and chooses an optimal trajectory and optimal control for the vehicle.
Examples
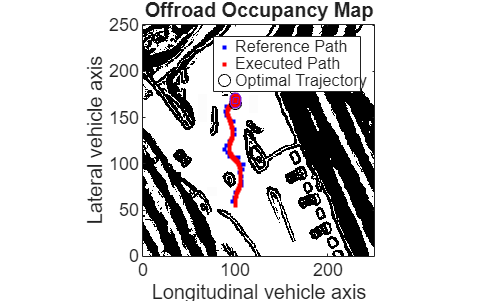
Plan Path Using Differential Drive MPPI Controller in Simulink
Follow an obstacle-free path with a differential drive vehicle model between two locations on a given map in Simulink®.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2025a