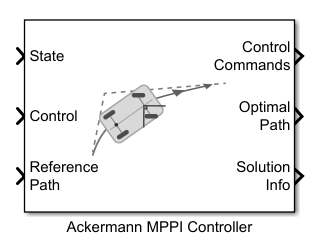
Ackermann MPPI Controller
Control motion planning of Ackermann vehicle model using Model Predictive Path Integral (MPPI)
Since R2025a
Libraries:
Offroad Autonomy Library /
Vehicle Controllers
Description
Add-On Required: This feature requires the Robotics System Toolbox Offroad Autonomy Library add-on.
The Ackermann MPPI Controller block enables you to plan a local path for an Ackermann Kinematic Model, following a reference path typically generated by a global path planner such as RRT* or Hybrid A*, using the model predictive path integral (MPPI) algorithm.
The Ackermann vehicle model represents a vehicle with two axles separated by the distance, specified in the Wheel Base parameter. The state of the vehicle is defined as a four-element vector, [x y θ ψ], with a global xy-position, vehicle heading, θ, and steering angle, ψ. The vehicle heading and xy-position are defined at the center of the rear axle.

At each state of the vehicle along the reference path, the MPPI controller samples potential trajectories for a short segment along the reference path, based on the current state and control of the vehicle. The controller evaluates these trajectories using a cost function to smooth the path and chooses an optimal trajectory and optimal control for the vehicle.
Examples
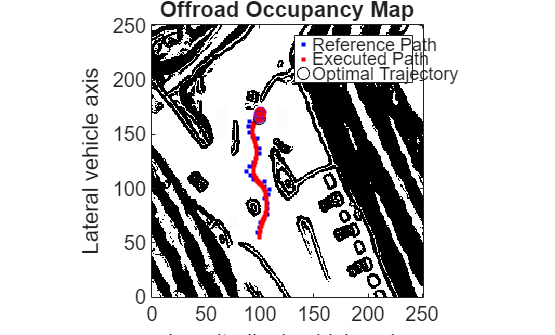
Plan Path Using Ackermann MPPI Controller in Simulink
Follow an obstacle-free path with an Ackermann vehicle model between two locations on a given map in Simulink®.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2025a