prognosability
Measure of variability of condition indicators at failure
Syntax
Description
Y = prognosability(X)X. Use
prognosability as a measure of the variability of a feature at
failure based on the trajectories of the feature measured in several run-to-failure
experiments. A more prognosable feature has less variation at failure relative to the
range between its initial and final values. The values of Y range from
0 to 1, where Y is 1 if X is perfectly prognosable
and 0 if X is non-prognosable.
Y = prognosability(X,lifetimeVar)X using the lifetime
variable lifetimeVar.
Y = prognosability(X,lifetimeVar,dataVar)X using the data
variables specified by dataVar.
Y = prognosability(X,lifetimeVar,dataVar,memberVar)X using the lifetime
variable lifetimeVar, the data variables specified by
dataVar, and the member variable
memberVar.
Y = prognosability(___,Name,Value)Name,Value pair arguments. You can use this syntax with any of the
previous input-argument combinations.
prognosability(___) with no output arguments plots a
bar chart of ranked prognosability values.
Examples
In this example, consider the lifetime data of 10 identical machines with the following 6 potential condition indicators—constant, linear, quadratic, cubic, logarithmic, and periodic. The data set machineDataCellArray.mat contains C, which is a 1x10 cell array of matrices where each element of the cell array is a matrix that contains the lifetime data of a machine. For each matrix in the cell array, the first column contains the time while the other columns contain the data variables.
Load the lifetime data and visualize it against time.
load('machineDataCellArray.mat','C') display(C)
C=1×10 cell array
{219×7 double} {189×7 double} {202×7 double} {199×7 double} {229×7 double} {184×7 double} {224×7 double} {208×7 double} {181×7 double} {197×7 double}
for k = 1:length(C) plot(C{k}(:,1), C{k}(:,2:end)); hold on; end
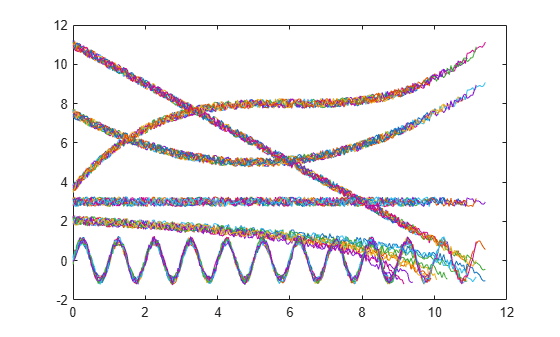
Observe the 6 different condition indicators—constant, linear, quadratic, cubic, logarithmic, and periodic—for all 10 machines on the plot.
Visualize the prognosability of the potential condition indicators.
prognosability(C)
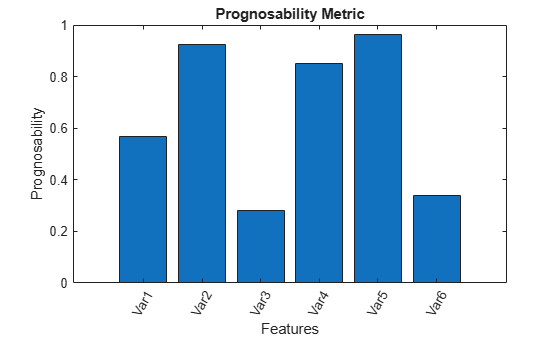
From the histogram plot, observe that the features Var2, Var4 and Var5 rank better than the others. Hence, these features are more appropriate for remaining useful life predictions since they are the best indicators of machine health.
In this example, consider the lifetime data of 10 identical machines with the following 6 potential condition indicators—constant, linear, quadratic, cubic, logarithmic, and periodic. The data set machineDataTable.mat contains T, which is a 1x10 cell array of tables where each element of the cell array contains a table of lifetime data for a machine.
Load and display the data.
load('machineDataTable.mat','T'); display(T)
T=1×10 cell array
{219×7 table} {189×7 table} {202×7 table} {199×7 table} {229×7 table} {184×7 table} {224×7 table} {208×7 table} {181×7 table} {197×7 table}
head(T{1},2) Time Constant Linear Quadratic Cubic Logarithmic Periodic
____ ________ ______ _________ ______ ___________ ________
0 3.2029 11.203 7.7029 3.8829 2.2517 0.2029
0.05 2.8135 10.763 7.2637 3.6006 1.8579 0.12251
Note that every table in the cell array contains the lifetime variable 'Time' and the data variables 'Constant', 'Linear', 'Quadratic', 'Cubic', 'Logarithmic', and 'Periodic'.
Compute prognosability with Time as the lifetime variable.
Y = prognosability(T,'Time')Y=1×6 table
Constant Linear Quadratic Cubic Logarithmic Periodic
________ _______ _________ _______ ___________ ________
0.56697 0.92321 0.28044 0.85048 0.96475 0.33853
From the resultant table of prognosability values, observe that the linear, cubic, and logarithmic features have values closer to 1. Hence, these three features are more appropriate for predicting remaining useful life since they are the best indicators of machine health.
Consider the lifetime data of 4 machines. Each machine has 4 fault codes for the potential condition indicators—voltage, current, and power. prognosabilityEnsemble.zip is a collection of 4 files where every file contains a timetable of lifetime data for each machine—tbl1.mat, tbl2.mat, tbl3.mat and tbl4.mat. You can also use files containing data for multiple machines. For each timetable, the organization of the data is as follows:
![]()
When you perform calculations on tall arrays, MATLAB® uses either a parallel pool (default if you have Parallel Computing Toolbox™) or the local MATLAB session. To run the example using the local MATLAB session, change the global execution environment by using the mapreducer function.
mapreducer(0)
Extract the compressed files, read the data in the timetables, and create a fileEnsembleDatastore object using the timetable data. For more information on creating a file ensemble datastore, see fileEnsembleDatastore.
unzip prognosabilityEnsemble.zip; ens = fileEnsembleDatastore(pwd,'.mat'); ens.DataVariables = {'Voltage','Current','Power','FaultCode','Machine'}; ens.ReadFcn = @readtable_data; ens.SelectedVariables = {'Voltage','Current','Power','FaultCode','Machine'};
Visualize the prognosability of the potential condition indicators with 'Machine' as the member variable and group the lifetime data by 'FaultCode'. Grouping the lifetime data ensures that prognosability calculates the metric for each fault code separately.
prognosability(ens,'MemberVariable','Machine','GroupBy','FaultCode');
Evaluating tall expression using the Local MATLAB Session: - Pass 1 of 1: Completed in 0.097 sec Evaluation completed in 0.19 sec Evaluating tall expression using the Local MATLAB Session: - Pass 1 of 1: Completed in 0.043 sec Evaluation completed in 0.1 sec Evaluating tall expression using the Local MATLAB Session: - Pass 1 of 1: Completed in 0.11 sec Evaluation completed in 0.12 sec
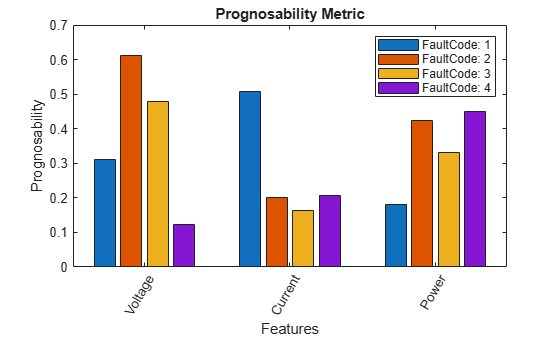
prognosability returns a histogram plot with the features ranked by their prognosability values. A higher prognosability value indicates a more suitable condition indicator. For instance, the candidate feature Current has the highest degree of prognosability for machines with FaultCode 1.
Input Arguments
Name-Value Arguments
Output Arguments
Limitations
When
Xis a tall table or tall timetable,prognosabilitynevertheless loads the complete array into memory usinggather. If the memory available is inadequate, thenprognosabilityreturns an error.
Algorithms
The computation of prognosability uses this formula:
where xj represents the vector of measurements of a feature on the jth system, variable M is the number of systems monitored, and Nj is the number of measurements on the jth system.
References
[1] Coble, J., and J. W. Hines. "Identifying Optimal Prognostic Parameters from Data: A Genetic Algorithms Approach." In Proceedings of the Annual Conference of the Prognostics and Health Management Society. 2009.
[2] Coble, J. "Merging Data Sources to Predict Remaining Useful Life - An Automated Method to Identify Prognostics Parameters." Ph.D. Thesis. University of Tennessee, Knoxville, TN, 2010.
[3] Lei, Y. Intelligent Fault Diagnosis and Remaining Useful Life Prediction of Rotating Machinery. Xi'an, China: Xi'an Jiaotong University Press, 2017.
[4] Lofti, S., J. B. Ali, E. Bechhoefer, and M. Benbouzid. "Wind turbine high-speed shaft bearings health prognosis through a spectral Kurtosis-derived indices and SVR." Applied Acoustics Vol. 120, 2017, pp. 1-8.
Version History
Introduced in R2018b