show
Plot pose graph
Description
show(
specifies options using poseGraph,Name,Value)Name,Value pair arguments. For example,
'IDs','on' plots all node and edge IDs of the pose
graph.
axes = show(___)
Examples
Optimize a pose graph based on the nodes and edge constraints. The pose graph used in this example is from the Intel Research Lab Dataset and was generated from collecting wheel odometry and a laser range finder sensor information in an indoor lab.
Load the Intel® data set that contains a 2-D pose graph. Inspect the poseGraph object to view the number of nodes and loop closures.
load intel-2d-posegraph.mat pg disp(pg)
poseGraph with properties:
NumNodes: 1228
NumEdges: 1483
NumLoopClosureEdges: 256
LoopClosureEdgeIDs: [1228 1229 1230 1231 1232 1233 1234 1235 1236 1237 1238 1239 1240 1241 1242 1243 1244 1245 1246 1247 1248 1249 1250 1251 1252 1253 1254 1255 1256 1257 1258 1259 1260 1261 1262 1263 1264 1265 1266 1267 1268 1269 … ] (1×256 double)
LandmarkNodeIDs: [1×0 double]
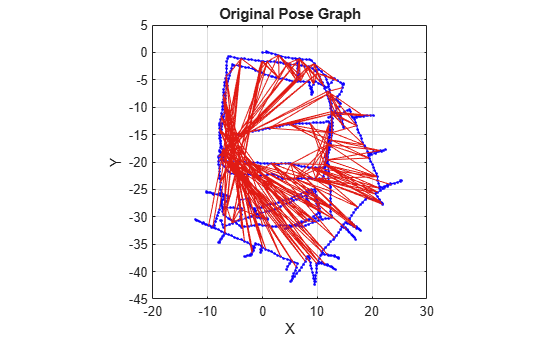
Plot the pose graph with IDs off. Red lines indicate loop closures identified in the dataset.
show(pg,'IDs','off'); title('Original Pose Graph')
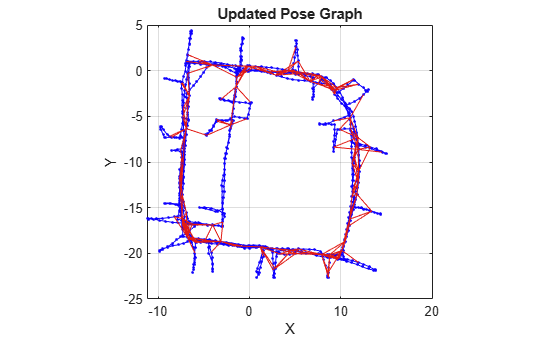
Optimize the pose graph. Nodes are adjusted based on the edge constraints and loop closures. Plot the optimized pose graph to see the adjustment of the nodes with loop closures.
updatedPG = optimizePoseGraph(pg); figure show(updatedPG,'IDs','off'); title('Updated Pose Graph')
Optimize a pose graph based on the nodes and edge constraints. The pose graph used in this example is taken from the MIT Dataset and was generated using information extracted from a parking garage.
Load the pose graph from the MIT dataset. Inspect the poseGraph3D object to view the number of nodes and loop closures.
load parking-garage-posegraph.mat pg disp(pg);
poseGraph3D with properties:
NumNodes: 1661
NumEdges: 6275
NumLoopClosureEdges: 4615
LoopClosureEdgeIDs: [128 129 130 132 133 134 135 137 138 139 140 142 143 144 146 147 148 150 151 204 205 207 208 209 211 212 213 215 216 217 218 220 221 222 223 225 226 227 228 230 231 232 233 235 236 237 238 240 241 242 243 244 … ] (1×4615 double)
LandmarkNodeIDs: [1×0 double]
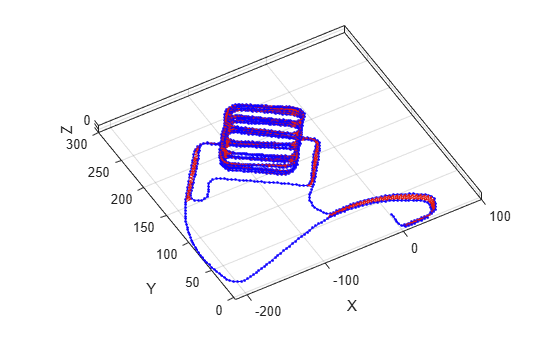
Plot the pose graph with IDs off. Red lines indicate loop closures identified in the dataset.
title('Original Pose Graph') show(pg,'IDs','off'); view(-30,45)
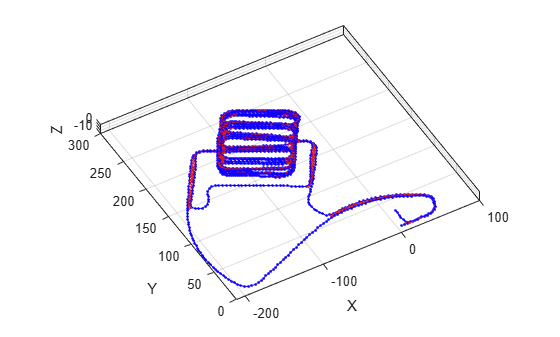
Optimize the pose graph. Nodes are adjusted based on the edge constraints and loop closures. Plot the optimized pose graph to see the adjustment of the nodes with loop closures.
updatedPG = optimizePoseGraph(pg); figure title('Updated Pose Graph') show(updatedPG,'IDs','off'); view(-30,45)
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2019b