setOccupancy
Set occupancy probability of locations
Description
Examples
Create an occupancyMap3D object.
map3D = occupancyMap3D;
Create a ground plane and set occupancy values to 0.
[xGround,yGround,zGround] = meshgrid(0:100,0:100,0); xyzGround = [xGround(:) yGround(:) zGround(:)]; occval = 0; setOccupancy(map3D,xyzGround,occval)
Create obstacles in specific world locations of the map.
[xBuilding1,yBuilding1,zBuilding1] = meshgrid(20:30,50:60,0:30); [xBuilding2,yBuilding2,zBuilding2] = meshgrid(50:60,10:30,0:40); [xBuilding3,yBuilding3,zBuilding3] = meshgrid(40:60,50:60,0:50); [xBuilding4,yBuilding4,zBuilding4] = meshgrid(70:80,35:45,0:60); xyzBuildings = [xBuilding1(:) yBuilding1(:) zBuilding1(:);... xBuilding2(:) yBuilding2(:) zBuilding2(:);... xBuilding3(:) yBuilding3(:) zBuilding3(:);... xBuilding4(:) yBuilding4(:) zBuilding4(:)];
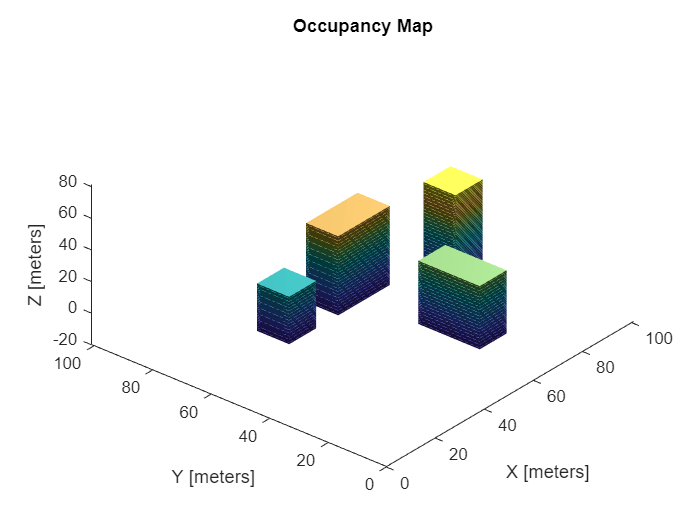
Update the obstacles with new probability values and display the map.
obs = 0.65; updateOccupancy(map3D,xyzBuildings,obs) show(map3D)
Check if the map file named citymap.ot already exist in the current directory and delete it before creating the map file.
if exist("citymap.ot",'file') delete("citymap.ot") end
Export the map as an octree file.
filePath = fullfile(pwd,"citymap.ot");
exportOccupancyMap3D(map3D,filePath)Input Arguments
Extended Capabilities
Version History
Introduced in R2019b