insertPointCloud
Insert 3-D points or point cloud observation into map
Syntax
Description
insertPointCloud(
inserts one or more sensor observations at the given map3D,pose,points,maxrange)points
in the occupancy map, map3D. Occupied points are updated
with an observation of 0.7. All other points between the sensor
pose and points are treated as
obstacle-free and updated with an observation of 0.4. Points outside
maxrange are not updated. NaN values
are ignored.
insertPointCloud(___,
inserts a point cloud with updated probabilities invModel)invModel
that correspond to obstacle-free and occupied observations. Use any of the
previous syntaxes to input the point cloud.
Examples
The occupancyMap3D object stores obstacles in 3-D space, using sensor observations to map an environment. Create a map and add points from a point cloud to identify obstacles. Then inflate the obstacles in the map to ensure safe operating space around obstacles.
Create an occupancyMap3D object with a map resolution of 10 cells/meter.
map3D = occupancyMap3D(10);
Define a set of 3-D points as an observation from a pose [x y z qw qx qy qz]. This pose is for the sensor that observes these points and is centered on the origin. Define two sets of points to insert multiple observations.
pose = [ 0 0 0 1 0 0 0]; points = repmat((0:0.25:2)', 1, 3); points2 = [(0:0.25:2)' (2:-0.25:0)' (0:0.25:2)']; maxRange = 5;
Insert the first set of points using insertPointCloud. The function uses the sensor pose and the given points to insert observations into the map. The colors displayed correlate to the height of the point only for illustrative purposes.
insertPointCloud(map3D,pose,points,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_01.png)
Insert the second set of points. The ray between the sensor pose (origin) and these points overlap points from the previous insertion. Therefore, the free space between the sensor and the new points are updated and marked as free space.
insertPointCloud(map3D,pose,points2,maxRange) show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_02.png)
Inflate the map to add a buffer zone for safe operation around obstacles. Define the vehicle radius and safety distance and use the sum of these values to define the inflation radius for the map.
vehicleRadius = 0.2; safetyRadius = 0.3; inflationRadius = vehicleRadius + safetyRadius; inflate(map3D, inflationRadius); show(map3D)
![Figure contains an axes object. The axes object with title Occupancy Map, xlabel X [meters], ylabel Y [meters] contains an object of type patch.](../../examples/nav/win64/Create3DOccupancyMapAndInflatePointsExample_03.png)
Input Arguments
More About
The inverse sensor model determines how
sensor readings and obstacle values are set in a point cloud. You can customize this
model by specifying different probabilities for free and occupied locations in the
invModel argument. NaN range values are
ignored. Range values greater than maxrange are not
updated.
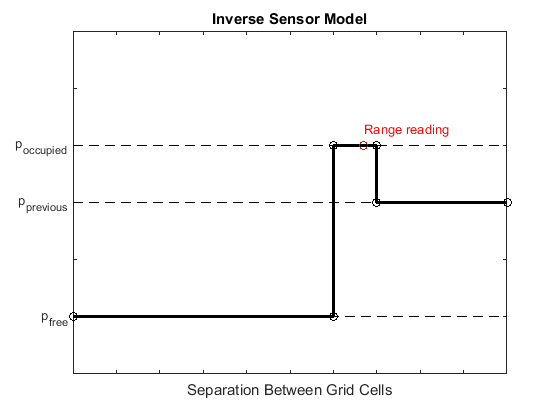
Grid locations that contain range readings are updated with the occupied probability. Locations before the reading are updated with the free probability. All locations after the reading are not updated.