setup
Syntax
Description
setup( sets up the mobileProp)mobileRobotPropagator object based on the properties of the object. If you
change the properties of the object, use this object function before you use the object to
sample controls, propagate the system, or calculate distances.
Note
Override this function to implement custom functionality to run in the setup.
Examples
Create a state propagator and specify the distance metric for estimating propagation cost.
propagator = mobileRobotPropagator(DistanceEstimator="dubins");Create a Dubins state space.
dubinsSpace = stateSpaceDubins([0 25; 0 25; -pi pi]);
Update the state space of the state propagator using the created state space.
propagator.StateSpace = dubinsSpace; setup(propagator)
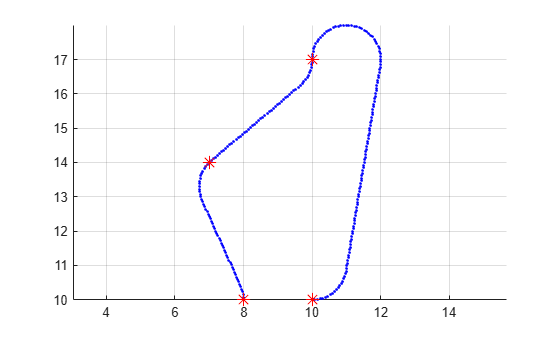
Create a navPath object based on multiple waypoints in a Dubins space.
path = navPath(dubinsSpace);
waypoints = [8 10 pi/2;
7 14 pi/4;
10 17 pi/2;
10 10 -pi];
append(path,waypoints)Interpolate that path so that it contains exactly 250 points.
numStates = 250; interpolate(path,numStates)
Extract the sequence of motions from the path.
q1 = path.States(1:end-1,:); % Initial states q2 = path.States(2:end,:); % Final states
Estimate the cost of propagating to target state.
cost = distance(propagator,q1,q2);
Generate a series of control commands and number of steps to move from the current state q1 with control command u toward the target state q2.
u = zeros(size(q1,1),propagator.NumControlOutput); steps = zeros(size(q1,1),1); for i = 1:size(q1,1) [u(i+1,:),steps(i)] = sampleControl(propagator,q1(i,:),u(i,:),q2(i,:)); end
Create a control-based path object with the specified state propagator and a sequence of specified states, controls, targets, and durations.
states = path.States; controls = u(2:end,:); targets = q2; durations = steps*propagator.ControlStepSize; path2 = navPathControl(propagator,states,controls,targets,durations);
Visualize the results.
figure grid on axis equal hold on plot(path2.States(:,1),path2.States(:,2),".b") plot(waypoints(:,1),waypoints(:,2),"*r","MarkerSize",10)
Input Arguments
Version History
Introduced in R2021b