lidarScan
Create object for storing 2-D lidar scan
Description
A lidarScan object contains data for a single 2-D lidar
(light detection and ranging) scan. The lidar scan is a laser scan for a 2-D plane with
distances (Ranges) measured from the sensor to obstacles in the
environment at specific angles (Angles). Use this laser scan object
as an input to other robotics algorithms such as matchScans, controllerVFH, or monteCarloLocalization.
Creation
Description
scan = lidarScan(ranges,angles)lidarScan object from the
ranges and angles, that
represent the data collected from a lidar sensor. The
ranges and angles inputs are
vectors of the same length and are set directly to the
Ranges and Angles
properties.
scan = lidarScan(cart)lidarScan object using the input Cartesian
coordinates as an n-by-2 matrix. The
Cartesian property is set directly from this
input.
scan = lidarScan(scanMsg)lidarScan object from a LaserScan (ROS Toolbox) ROS message object.
Properties
Object Functions
plot | Display laser or lidar scan readings |
removeInvalidData | Remove invalid range and angle data |
transformScan | Transform laser scan based on relative pose |
Examples
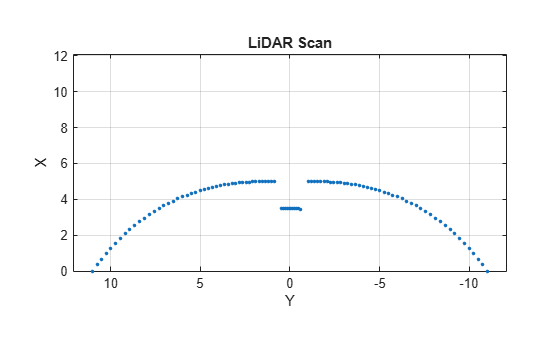
Specify lidar data as vectors of ranges and angles. These values include readings outside of the sensors range.
x = linspace(-2,2); ranges = abs((1.5).*x.^2 + 5); ranges(45:55) = 3.5; angles = linspace(-pi/2,pi/2,numel(ranges));
Create a lidar scan by specifying the ranges and angles. Plot all points of the lidar scan.
scan = lidarScan(ranges,angles); plot(scan)
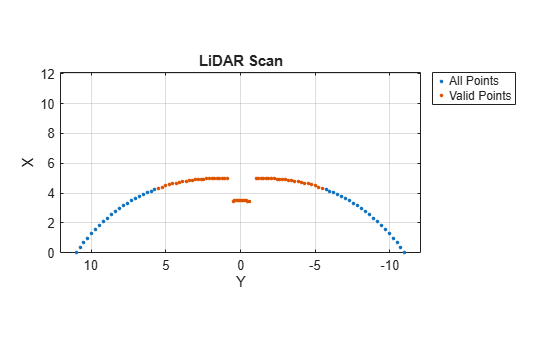
Remove invalid points based on a specified minimum and maximum range.
minRange = 0.1; maxRange = 7; scan2 = removeInvalidData(scan,'RangeLimits',[minRange maxRange]); hold on plot(scan2) legend('All Points','Valid Points')
Create a lidarScan object. Specify the ranges and angles as vectors.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Translate the laser scan by an [x y] offset of (0.5,0.2).
transformedScan = transformScan(refScan,[0.5 0.2 0]);
Rotate the laser scan by 20 degrees.
rotateScan = transformScan(refScan,[0,0,deg2rad(20)]);
Create a reference lidar scan using lidarScan (Robotics System Toolbox). Specify ranges and angles as vectors.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Using the transformScan (Robotics System Toolbox) function, generate a second lidar scan at an x,y offset of (0.5,0.2).
currScan = transformScan(refScan,[0.5 0.2 0]);
Match the reference scan and the second scan to estimate the pose difference between them.
pose = matchScans(currScan,refScan);
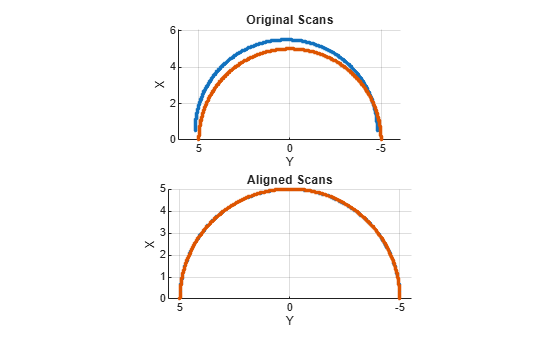
Use the transformScan function to align the scans by transforming the second scan into the frame of the first scan using the relative pose difference. Plot both the original scans and the aligned scans.
currScan2 = transformScan(currScan,pose); subplot(2,1,1); hold on plot(currScan) plot(refScan) title('Original Scans') hold off subplot(2,1,2); hold on plot(currScan2) plot(refScan) title('Aligned Scans') xlim([0 5]) hold off
Extended Capabilities
Version History
Introduced in R2019b
See Also
matchScans | transformScan | controllerVFH | monteCarloLocalization