c2d
Convert model from continuous to discrete time
Description
sysd = c2d(sysc,Ts)sysc using zero-order hold on the inputs and a sample time of
Ts.
Examples
Discretize the following continuous-time transfer function:
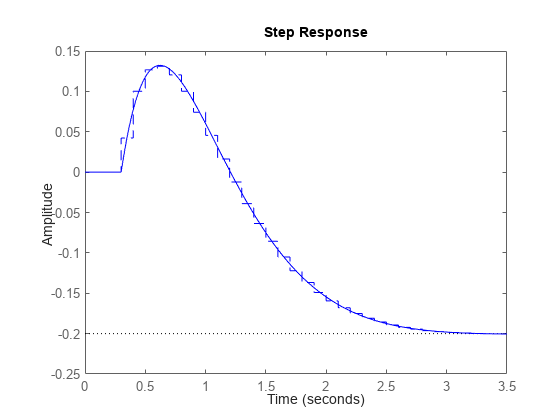
This system has an input delay of 0.3 s. Discretize the system using the triangle (first-order-hold) approximation with sample time Ts = 0.1 s.
H = tf([1 -1],[1 4 5],'InputDelay', 0.3); Hd = c2d(H,0.1,'foh');
Compare the step responses of the continuous-time and discretized systems.
step(H,'-',Hd,'--')
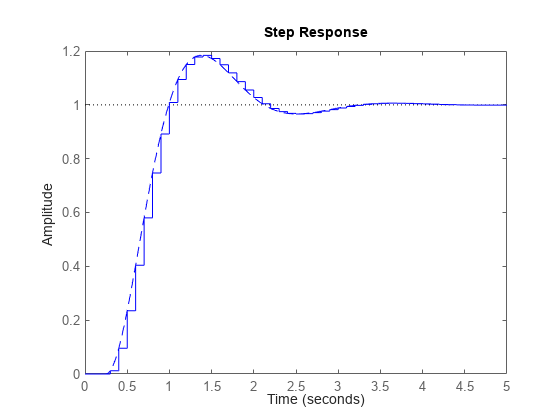
Discretize the following delayed transfer function using zero-order hold on the input, and a 10-Hz sampling rate.
h = tf(10,[1 3 10],'IODelay',0.25);
hd = c2d(h,0.1)hd =
0.01187 z^2 + 0.06408 z + 0.009721
z^(-3) * ----------------------------------
z^2 - 1.655 z + 0.7408
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
In this example, the discretized model hd has a delay of three sampling periods. The discretization algorithm absorbs the residual half-period delay into the coefficients of hd.
Compare the step responses of the continuous-time and discretized models.
step(h,'--',hd,'-')
Since R2024a
Create a continuous-time state-space model with two states and an input delay.
sys = ss(tf([1,2],[1,4,2])); sys.InputDelay = 2.7
sys =
A =
x1 x2
x1 -4 -2
x2 1 0
B =
u1
x1 2
x2 0
C =
x1 x2
y1 0.5 1
D =
u1
y1 0
Input delays (seconds): 2.7
Continuous-time state-space model.
Model Properties
Discretize the model using the Tustin discretization method and a Thiran filter to model fractional delays. The sample time Ts = 1 second.
opt = c2dOptions('Method','tustin','ThiranOrder',3); sysd1 = c2d(sys,1,opt)
sysd1 =
A =
x1 x2
x1 -0.4286 -0.5714
x2 0.2857 0.7143
B =
u1
x1 0.5714
x2 0.2857
C =
x1 x2
y1 0.2857 0.7143
D =
u1
y1 0.2857
(values computed with all internal delays set to zero)
Internal delays (sampling periods): 1 1 1
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
By default, the function models extra delays as internal delays in the discretized model. To model extra delays as states in the discretized model, set the DelayModeling option of c2dOptions to 'state'.
opt2 = c2dOptions('Method','tustin','ThiranOrder',3,'DelayModeling','state'); sysd2 = c2d(sys,1,opt2)
sysd2 =
A =
x1 x2 x3 x4 x5
x1 -0.4286 -0.5714 -0.00265 0.06954 2.286
x2 0.2857 0.7143 -0.001325 0.03477 1.143
x3 0 0 -0.2432 0.1449 -0.1153
x4 0 0 0.25 0 0
x5 0 0 0 0.125 0
B =
u1
x1 0.002058
x2 0.001029
x3 8
x4 0
x5 0
C =
x1 x2 x3 x4 x5
y1 0.2857 0.7143 -0.001325 0.03477 1.143
D =
u1
y1 0.001029
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
The discretized model now contains three additional states x3, x4, and x5 corresponding to a third-order Thiran filter. Since the time delay divided by the sample time is 2.7, the third-order Thiran filter ('ThiranOrder' = 3) can approximate the entire time delay.
Estimate a continuous-time transfer function, and discretize it.
load iddata1 sys1c = tfest(z1,2); sys1d = c2d(sys1c,0.1,'zoh');
Estimate a second order discrete-time transfer function.
sys2d = tfest(z1,2,'Ts',0.1);Compare the response of the discretized continuous-time transfer function model, sys1d, and the directly estimated discrete-time model, sys2d.
compare(z1,sys1d,sys2d)
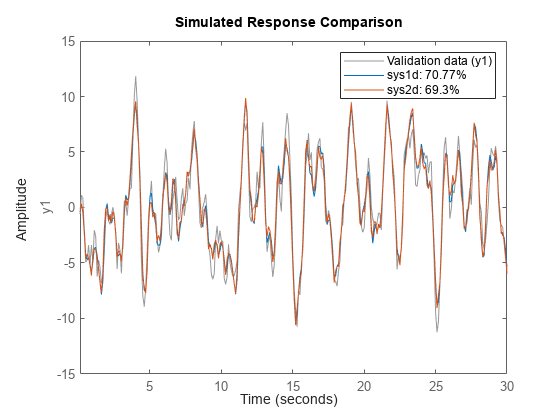
The two systems are almost identical.
Discretize an identified state-space model to build a one-step ahead predictor of its response.
Create a continuous-time identified state-space model using estimation data.
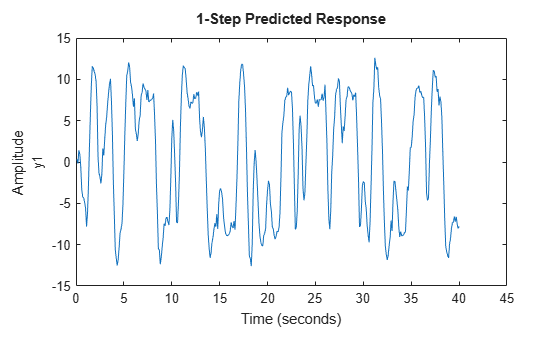
load iddata2
sysc = ssest(z2,4);Predict the 1-step ahead predicted response of sysc.
predict(sysc,z2)
Discretize the model.
sysd = c2d(sysc,0.1,'zoh');Build a predictor model from the discretized model, sysd.
[A,B,C,D,K] = idssdata(sysd); Predictor = ss(A-K*C,[K B-K*D],C,[0 D],0.1);
Predictor is a two-input model which uses the measured output and input signals ([z1.y z1.u]) to compute the 1-step predicted response of sysc.
Simulate the predictor model to get the same response as the predict command.
lsim(Predictor,[z2.y,z2.u])
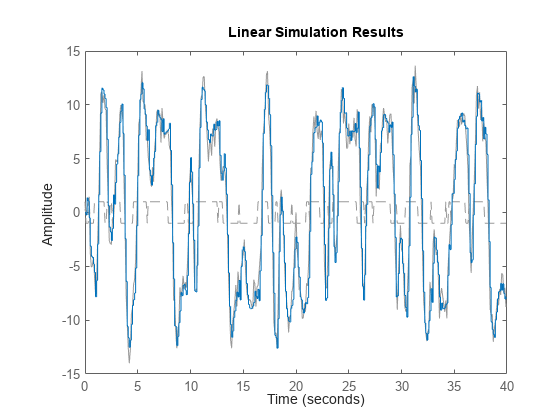
The simulation of the predictor model gives the same response as predict(sysc,z2).
Input Arguments
Output Arguments
Version History
Introduced before R2006aSee Also
c2dOptions | d2c | d2d | thiran (Control System Toolbox) | translatecov