absorbDelay
Replace time delays by poles at z = 0 or phase shift
Description
Use absorbDelay to eliminate time delays and model them
into additional system dynamics or frequency response data.
For discrete-time models (other than frequency response data models), the function replaces a delay of k sampling periods with k poles at z = 0. For continuous-time models (other than frequency response data models), time delays have no exact representation with a finite number of poles and zeros. Therefore, use
pade(Control System Toolbox) to compute a rational approximation of the time delay.For frequency response data models in both continuous and discrete time,
absorbDelayabsorbs all time delays into the frequency response data as a phase shift.
Examples
Create a discrete-time transfer function that has a time delay.
z = tf('z',-1);
sysd = (-0.4*z -0.1)/(z^2 + 1.05*z + 0.08);
sysd.InputDelay = 3sysd =
-0.4 z - 0.1
z^(-3) * -------------------
z^2 + 1.05 z + 0.08
Sample time: unspecified
Discrete-time transfer function.
Model Properties
The display of sysd represents the InputDelay as a factor of z^(-3), separate from the system poles that appear in the transfer function denominator.
Absorb the time delay into the system dynamics as poles at z= 0.
sysnd = absorbDelay(sysd)
sysnd =
-0.4 z - 0.1
-------------------------
z^5 + 1.05 z^4 + 0.08 z^3
Sample time: unspecified
Discrete-time transfer function.
Model Properties
The display of sysnd shows that the factor of z^(-3) has been absorbed as additional poles in the denominator.
Verify that sysnd has no input delay.
sysnd.InputDelay
ans = 0
Create a discrete-time polynomial model.
m = idpoly(1,[0 0 0 2 3]);
Convert m to a transfer function model.
sys = tf(m)
sys = z^(-2) * (2 z^-1 + 3 z^-2) Sample time: unspecified Discrete-time transfer function. Model Properties
The numerator of the transfer function, sys, is [0 2 3] and the transport delay, sys.IODelay, is 2. This is because the value of the B polynomial, m.B, has 3 leading zeros. The first fixed zero shows lack of feedthrough in the model. The two zeros after that are treated as input-output delays.
Use absorbDelay to treat the leading zeros as regular B coefficients.
m2 = absorbDelay(m); sys2 = tf(m2)
sys2 = 2 z^-3 + 3 z^-4 Sample time: unspecified Discrete-time transfer function. Model Properties
The numerator of sys2 is [0 0 0 2 3] and transport delay is 0. The model m2 treats the leading zeros as regular coefficients by freeing their values. m2.Structure.B.Free(2:3) is TRUE while m.Structure.B.Free(2:3) is FALSE.
Since R2024a
This example shows how to absorb a specific delay type using the absorbDelay function.
Consider a MIMO model containing delays in input and output channels and between I/O pairs.
rng(0) sys = drss(3,2,3); sys.InputDelay = [1 0 4]; sys.OutputDelay = [3 1]; sys.IODelay = [0 1 2;3 0 1];
Absorb the delays in output channel and between I/O pairs.
sysnd = absorbDelay(sys,["output","io"]);
Verify has system only has delays in the input channel.
sysnd.InputDelay
ans = 3×1
1
0
4
sysnd.OutputDelay
ans = 2×1
0
0
sysnd.IODelay
ans = 2×3
0 0 0
0 0 0
Despite absorbing the delays, the responses of sys exactly match those of sysnd.
step(sys,sysnd,'r--')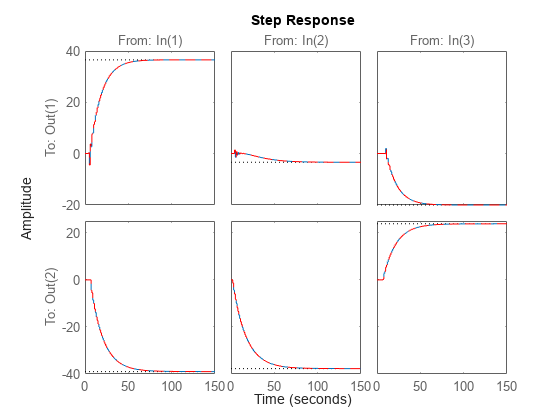
Input Arguments
Output Arguments
Version History
Introduced in R2012aSee Also
hasdelay | pade (Control System Toolbox) | totaldelay