slerp
Spherical linear interpolation
Description
Examples
Create two quaternions with the following interpretation:
a= 45 degree rotation around the z-axisc= -45 degree rotation around the z-axis
a = quaternion([45,0,0],"eulerd","ZYX","frame"); c = quaternion([-45,0,0],"eulerd","ZYX","frame");
Call slerp with the quaternions a and c and specify an interpolation coefficient of 0.5.
interpolationCoefficient = 0.5; b = slerp(a,c,interpolationCoefficient);
The output of slerp, b, represents an average rotation of a and c. To verify, convert b to Euler angles in degrees.
averageRotation = eulerd(b,"ZYX","frame")
averageRotation = 1×3
0 0 0
The interpolation coefficient is specified as a normalized value between 0 and 1, inclusive. An interpolation coefficient of 0 corresponds to the a quaternion, and an interpolation coefficient of 1 corresponds to the c quaternion. Call slerp with coefficients 0 and 1 to confirm.
b = slerp(a,c,[0,1]); eulerd(b,"ZYX","frame")
ans = 2×3
45.0000 0 0
-45.0000 0 0
You can create smooth paths between quaternions by specifying arrays of equally spaced interpolation coefficients.
path = 0:0.1:1; interpolatedQuaternions = slerp(a,c,path);
For quaternions that represent rotation only about a single axis, specifying interpolation coefficients as equally spaced results in quaternions equally spaced in Euler angles. Convert interpolatedQuaternions to Euler angles and verify that the difference between the angles in the path is constant.
k = eulerd(interpolatedQuaternions,"ZYX","frame"); abc = abs(diff(k))
abc = 10×3
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
Alternatively, you can use the dist function to verify that the distance between the interpolated quaternions is consistent. The dist function returns angular distance in radians; convert to degrees for easy comparison.
def = rad2deg(dist(interpolatedQuaternions(2:end),interpolatedQuaternions(1:end-1)))
def = 1×10
9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000
The SLERP algorithm interpolates along a great circle path connecting two quaternions. This example shows how the SLERP algorithm minimizes the great circle path.
Define four quaternions:
q0- quaternion indicating no rotation from the global frameq179- quaternion indicating a 179 degree rotation about the z-axisq180- quaternion indicating a 180 degree rotation about the z-axisq181- quaternion indicating a 181 degree rotation about the z-axis
q0 = ones(1,"quaternion"); q179 = quaternion([179,0,0],"eulerd","ZYX","frame"); q180 = quaternion([180,0,0],"eulerd","ZYX","frame"); q181 = quaternion([181,0,0],"eulerd","ZYX","frame");
Use slerp to interpolate between q0 and the three quaternion rotations. Specify that the paths are traveled in 10 steps.
T = linspace(0,1,10); q179path = slerp(q0,q179,T); q180path = slerp(q0,q180,T); q181path = slerp(q0,q181,T);
Plot each path in terms of Euler angles in degrees.
q179pathEuler = eulerd(q179path,"ZYX","frame"); q180pathEuler = eulerd(q180path,"ZYX","frame"); q181pathEuler = eulerd(q181path,"ZYX","frame"); plot(T,q179pathEuler(:,1),"bo", ... T,q180pathEuler(:,1),"r*", ... T,q181pathEuler(:,1),"gd"); legend("Path to 179 degrees", ... "Path to 180 degrees", ... "Path to 181 degrees") xlabel("Interpolation Coefficient") ylabel("Z-Axis Rotation (Degrees)")
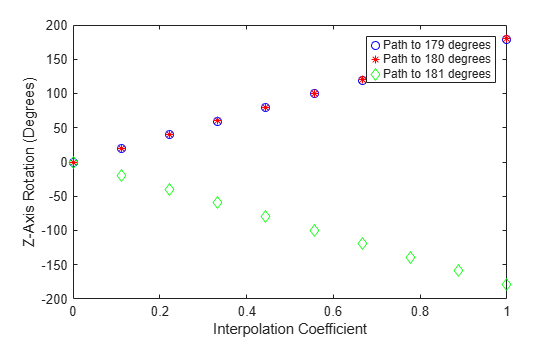
The path between q0 and q179 is clockwise to minimize the great circle distance. The path between q0 and q181 is counterclockwise to minimize the great circle distance. The path between q0 and q180 can be either clockwise or counterclockwise, depending on numerical rounding.
Create two quaternions.
q1 = quaternion([0 0 0],"eulerd","ZYX","frame"); q2 = quaternion([-180 90 180],"eulerd","ZYX","frame");
Define the interpolation coefficient.
T = 0:0.01:1;
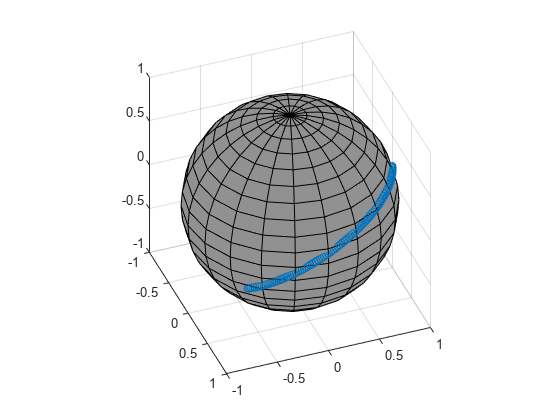
Interpolate quaternions using both the "short" and "natural" interpolation methods.
quats_natural = slerp(q1,q2,T,"natural"); quats_short = slerp(q1,q2,T,"short");
Obtain the corresponding rotate points.
pts_natural = rotatepoint(quats_natural,[1.05 0 0]); pts_short = rotatepoint(quats_short,[1.05 0 0]);
Show the interpolated quaternions on a unit sphere.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_natural(:,1),pts_natural(:,2),pts_natural(:,3),"filled") scatter3(pts_short(:,1),pts_short(:,2),pts_short(:,3),"filled") view([45 36.60]) axis equal title("SLERP Short vs Natural") legend("","SLERP Natural","SLERP Short")
Input Arguments
Output Arguments
Algorithms
Quaternion spherical linear interpolation (SLERP) is an extension of linear interpolation along a plane to spherical interpolation in three dimensions. The algorithm was first proposed in [1]. Given two quaternions, q1 and q2, SLERP interpolates a new quaternion, q0, along the great circle that connects q1 and q2. The interpolation coefficient, T, determines how close the output quaternion is to either q1 and q2.
The SLERP algorithm can be described in terms of sinusoids:
where q1 and q2 are normalized quaternions, and θ is half the angular distance between q1 and q2.
References
[1] Shoemake, Ken. "Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics 19, no. 3 (July 1985): 245–54. https://doi.org/10.1145/325165.325242.