meanrot
Quaternion mean rotation
Description
quatAverage = meanrot(quat)quat along the
first array dimension whose size not does equal 1.
If
quatis a vector,meanrot(quat)returns the average rotation of the elements.If
quatis a matrix,meanrot(quat)returns a row vector containing the average rotation of each column.If
quatis a multidimensional array, thenmearot(quat)operates along the first array dimension whose size does not equal 1, treating the elements as vectors. This dimension becomes 1 while the sizes of all other dimensions remain the same.
The meanrot function normalizes the input quaternions,
quat, before calculating the mean.
quatAverage = meanrot(quat,dim)dim. For example,
if quat is a matrix, then meanrot(quat,2) is
a column vector containing the mean of each row.
quatAverage = meanrot(___,nanflag)NaN values from the
calculation for any of the previous syntaxes.
meanrot(quat,"includenan") includes all
NaN values in the calculation while
mean(quat,"omitnan") ignores them.
Examples
Create a matrix of quaternions corresponding to three sets of Euler angles.
eulerAngles = [40 20 10; ... 50 10 5; ... 45 70 1]; quat = quaternion(eulerAngles,"eulerd","ZYX","frame");
Determine the average rotation represented by the quaternions. Convert the average rotation to Euler angles in degrees for readability.
quatAverage = meanrot(quat)
quatAverage = quaternion
0.88863 - 0.062598i + 0.27822j + 0.35918k
eulerAverage = eulerd(quatAverage,"ZYX","frame")
eulerAverage = 1×3
45.7876 32.6452 6.0407
Use meanrot over a sequence of quaternions to average out additive noise.
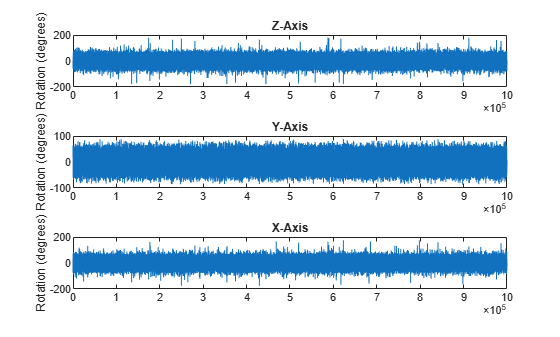
Create a vector of 1e6 quaternions whose distance, as defined by the dist function, from quaternion(1,0,0,0) is normally distributed. Plot the Euler angles corresponding to the noisy quaternion vector.
nrows = 1e6; ax = 2*rand(nrows,3) - 1; ax = ax./sqrt(sum(ax.^2,2)); ang = 0.5*randn(size(ax,1),1); q = quaternion(ax.*ang ,"rotvec"); noisyEulerAngles = eulerd(q,"ZYX","frame"); figure(1) subplot(3,1,1) plot(noisyEulerAngles(:,1)) title("Z-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,2) plot(noisyEulerAngles(:,2)) title("Y-Axis") ylabel("Rotation (degrees)") hold on subplot(3,1,3) plot(noisyEulerAngles(:,3)) title("X-Axis") ylabel("Rotation (degrees)") hold on
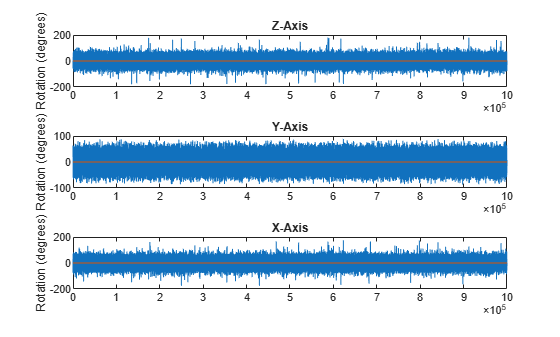
Use meanrot to determine the average quaternion given the vector of quaternions. Convert to Euler angles and plot the results.
qAverage = meanrot(q); qAverageInEulerAngles = eulerd(qAverage,"ZYX","frame"); figure(1) subplot(3,1,1) plot(ones(nrows,1)*qAverageInEulerAngles(:,1)) title("Z-Axis") subplot(3,1,2) plot(ones(nrows,1)*qAverageInEulerAngles(:,2)) title("Y-Axis") subplot(3,1,3) plot(ones(nrows,1)*qAverageInEulerAngles(:,3)) title("X-Axis")
The meanrot Algorithm
The meanrot function outputs a quaternion that minimizes the squared Frobenius norm of the difference between rotation matrices. Consider two quaternions:
q0represents no rotation.q90represents a 90 degree rotation about the x-axis.
q0 = quaternion([0 0 0],"eulerd","ZYX","frame"); q90 = quaternion([0 0 90],"eulerd","ZYX","frame");
Create a quaternion sweep, qSweep, that represents rotations from 0 to 180 degrees about the x-axis.
eulerSweep = (0:1:180)'; qSweep = quaternion([zeros(numel(eulerSweep),2),eulerSweep], ... "eulerd","ZYX","frame");
Convert q0, q90, and qSweep to rotation matrices. In a loop, calculate the metric to minimize for each member of the quaternion sweep. Plot the results and return the value of the Euler sweep that corresponds to the minimum of the metric.
r0 = rotmat(q0,"frame"); r90 = rotmat(q90,"frame"); rSweep = rotmat(qSweep,"frame"); metricToMinimize = zeros(size(rSweep,3),1); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r90),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")
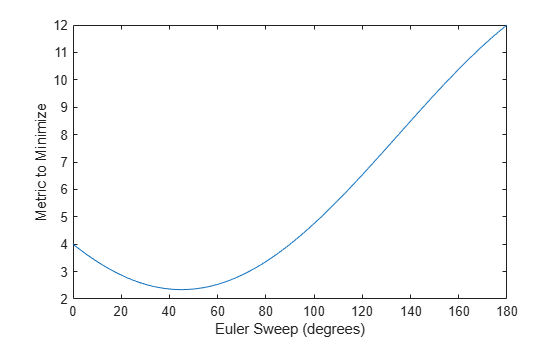
[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 45
The minimum of the metric corresponds to the Euler angle sweep at 45 degrees. That is, meanrot defines the average between quaterion([0 0 0],"ZYX","frame") and quaternion([0 0 90],"ZYX","frame") as quaternion([0 0 45],"ZYX","frame"). Call meanrot with q0 and q90 to verify the same result.
eulerd(meanrot([q0,q90]),"ZYX","frame")
ans = 1×3
0 0 45.0000
Limitations
The metric that meanrot uses to determine the mean rotation is not unique for quaternions significantly far apart. Repeat the experiment above for quaternions that are separated by 180 degrees.
q180 = quaternion([0 0 180],"eulerd","ZYX","frame"); r180 = rotmat(q180,"frame"); for i = 1:numel(qSweep) metricToMinimize(i) = norm((rSweep(:,:,i) - r0),"fro").^2 + ... norm((rSweep(:,:,i) - r180),"fro").^2; end plot(eulerSweep,metricToMinimize) xlabel("Euler Sweep (degrees)") ylabel("Metric to Minimize")
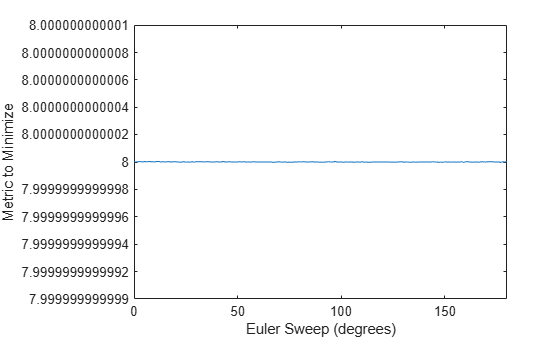
[~,eulerIndex] = min(metricToMinimize); eulerSweep(eulerIndex)
ans = 159
Quaternion means are usually calculated for rotations that are close to each other, which makes the edge case shown in this example unlikely in real-world applications. To average two quaternions that are significantly far apart, use the slerp function. Repeat the experiment using slerp and verify that the quaternion mean returned is more intuitive for large distances.
qMean = slerp(q0,q180,0.5); q0_q180 = eulerd(qMean,"ZYX","frame")
q0_q180 = 1×3
0 0 90.0000
Input Arguments
Output Arguments
Algorithms
meanrot determines a quaternion mean, , according to [1]. is the quaternion that minimizes the squared Frobenius norm of the
difference between rotation matrices:
References
[1] Markley, F. Landis, Yang Chen, John Lucas Crassidis, and Yaakov Oshman. "Average Quaternions." Journal of Guidance, Control, and Dynamics. Vol. 30, Issue 4, 2007, pp. 1193-1197.
Extended Capabilities
Version History
Introduced in R2018b