euler
Convert quaternion to Euler angles (radians)
Description
eulerAngles = euler(quat,rotationSequence,rotationType)quat, to an N-by-3
matrix of Euler angles.
Examples
Input Arguments
Quaternion to convert to Euler angles, specified as a quaternion object or an array of quaternion
objects of any dimensionality.
Rotation sequence of Euler angle representation, specified as one of these values.
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
The rotation sequence defines the order of rotations about the axes. For
example, if you specify a rotation sequence of "YZX":
The first rotation is about the y-axis.
The second rotation is about the new z-axis.
The third rotation is about the new x-axis.
Data Types: char | string
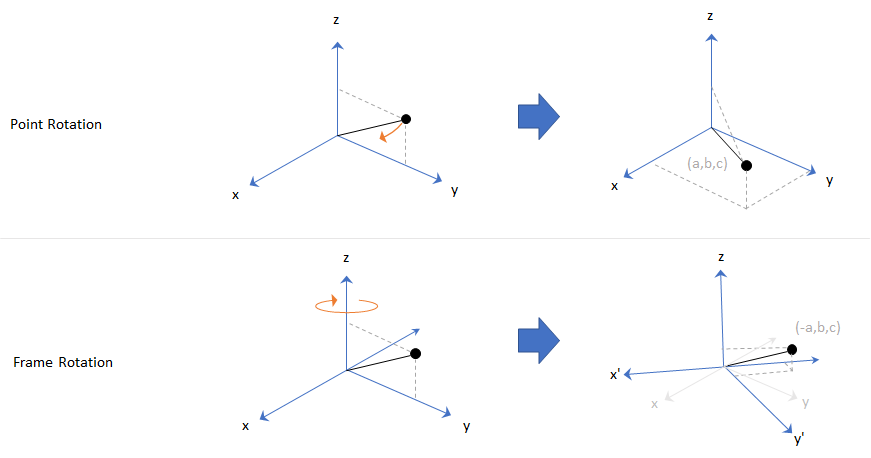
Type of rotation, specified as "point" or
"frame".
In a point rotation, the frame is static and the point moves. In a frame rotation, the point is static and the frame moves. Point rotation and frame rotation define equivalent angular displacements but in opposite directions.
Data Types: char | string
Output Arguments
Extended Capabilities
Version History
Introduced in R2018b