Probability Hypothesis Density (PHD) Tracker
Multi-sensor, multi-object PHD tracker

Libraries:
Sensor Fusion and Tracking Toolbox /
Multi-Object Tracking Algorithms
Description
The Probability Hypothesis Density (PHD) Tracker block creates and manages tracks of stationary and moving objects in a multi-sensor environment. The tracker uses a multi-target probability hypothesis density filter to estimate the states of point targets and extended objects. The PHD is represented by a weighted summation of probability density functions, and peaks in the PHD are extracted to represent possible targets. See Algorithms for more details.
Examples
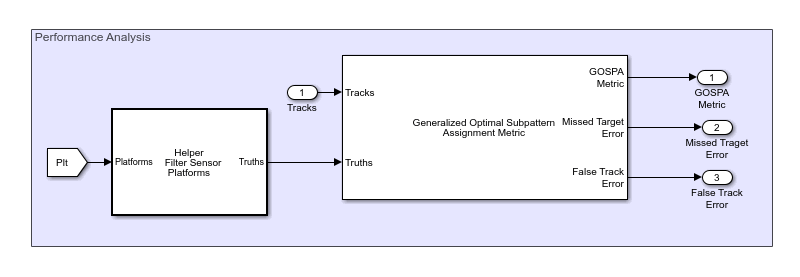
Track Point Targets in Dense Clutter Using GM-PHD Tracker in Simulink
Radars generally receive echoes from all surfaces in the signal path. These unwanted back-scattered signals or echoes generated from physical objects are called clutter. In a densely cluttered environment, missed detections and false alarms make tracking objects a challenging task for conventional trackers such as Global Nearest-Neighbor (GNN) tracker. In such an environment a PHD tracker provides better estimation of objects as it can handle multiple detections per object per sensor without clustering them first. This example shows you how to track points targets in dense clutter using a Gaussian mixture probability hypothesis density (GM-PHD) tracker with a constant velocity model in Simulink®. The example closely follows the Track Point Targets in Dense Clutter Using GM-PHD Tracker MATLAB® example.
Ports
Input
Output
Parameters
Algorithms
Probability hypothesis density (PHD) is a function defined over the state-space of the tracking system, and its value at a state is defined as the expected number of targets per unit state-space volume. The PHD is usually approximated by a mixture of components, and each component corresponds to an estimate of the state. The commonly used approximations of PHD are Gaussian mixture, SMC mixture, GGIW mixture, and GIW mixture.
To understand PHD, take the Gaussian mixture as an example. The Gaussian mixture can be represented by
where M is the total number of components, N(x|mi,Pi) is a normal distribution with mean mi and covariance Pi, and wi is the weight of the ith component. The weight wi denotes the number, which can be fractional, of targets represented by the ith component. Integration of D(x) over a state-space region results in the expected number of targets in that region. Integrating D(x) over the whole state space results in the total expected number of targets (∑ wi), since the integration of a normal distribution over the whole state space is 1. The x-coordinates of the peaks (local maximums) of D(x) represent the most likely states of targets.
For example, the following figure illustrates a PHD function given by D(x) = N(x|−4,2) + 0.5N(x|3,0.4) + 0.5N(x|4,0.4). The weight summation of these components is 2, which means that two targets probably exist. From the peaks of D(x), the possible positions of these targets are at x = −4, x = 3, and x = 4. Notice that the last two components are very close to each other, which means that these two components can possibly be attributed to one object.

References
[1] Granstorm, K., C. Lundquiest, and O. Orguner. " Extended target tracking using a Gaussian-mixture PHD filter." IEEE Transactions on Aerospace and Electronic Systems. Vol. 48, Number 4, 2012, pp. 3268-3286.
[2] Granstorm, K., and O. Orguner." A PHD filter for tracking multiple extended targets using random matrices." IEEE Transactions on Signal Processing. Vol. 60, Number 11, 2012, pp. 5657-5671.
[3] Granstorm, K., and A. Natale, P. Braca, G. Ludeno, and F. Serafino."Gamma Gaussian inverse Wishart probability hypothesis density for extended target tracking using X-band marine radar data." IEEE Transactions on Geoscience and Remote Sensing. Vol. 53, Number 12, 2015, pp. 6617-6631.
[4] Panta, Kusha, et al. “Data Association and Track Management for the Gaussian Mixture Probability Hypothesis Density Filter.” IEEE Transactions on Aerospace and Electronic Systems, vol. 45, no. 3, July 2009, pp. 1003–16.
[5] Ristic, B., et al. “Adaptive Target Birth Intensity for PHD and CPHD Filters.” IEEE Transactions on Aerospace and Electronic Systems, vol. 48, no. 2, 2012, pp. 1656–68.