Lane Following Control with Sensor Fusion and Lane Detection
This example shows how to simulate and generate code for an automotive lane-following controller.
In this example, you:
Review a control algorithm that combines sensor fusion, lane detection, and a lane following controller from the Model Predictive Control Toolbox™ software.
Test the control system in a closed-loop Simulink® model using synthetic data generated by Automated Driving Toolbox™ software.
Configure the code generation settings for software-in-the-loop simulation and automatically generate code for the control algorithm.
Introduction
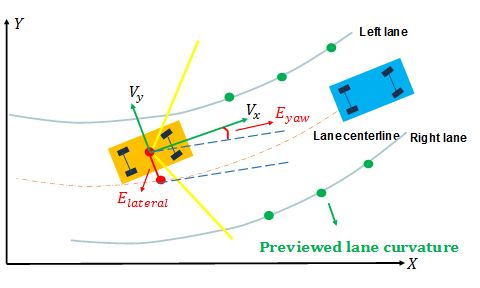
A lane following system is a control system that keeps the vehicle traveling within a marked lane of a highway, while maintaining a user-set velocity or safe distance from the preceding vehicle. A lane following system includes combined longitudinal and lateral control of the ego vehicle:
Longitudinal control - Maintain a driver-set velocity and keep a safe distance from the preceding car in the lane by adjusting the acceleration of the ego vehicle.
Lateral control - Keep the ego vehicle traveling along the centerline of its lane by adjusting the steering of the ego vehicle
The combined lane following control system achieves the individual goals for longitudinal and lateral control. Further, the lane following control system can adjust the priority of the two goals when they cannot be met simultaneously.
For an example of longitudinal control using adaptive cruise control (ACC) with sensor fusion, see Adaptive Cruise Control with Sensor Fusion. For an example of lateral control using a lane keeping assist (LKA) system with lane detection, see Lane Keeping Assist with Lane Detection. The ACC example assumes ideal lane detection, and the LKA example does not consider surrounding vehicles.
In this example, both lane detection and surrounding cars are considered. The lane following system synthesizes data from vision and radar detections, estimates the lane center and lead car distance, and calculates the longitudinal acceleration and steering angle of the ego vehicle.
Get a list of systems that are open now so any systems opened during this example can be closed at the end.
startingOpenSystems = find_system('MatchFilter', @Simulink.match.allVariants);
Define Scenario
Before opening the model, you can optionally change the scenario that the model simulates. This scenario selection is controlled by a callback function, helperLFSetUp, which runs when the model opens.
By default, the model simulates a cut-in scenario on a curved road. To change the default scenario used, either edit the setup script by clicking the Edit Setup Script button in the model or by calling helperLFSetup with a new input scenario. For example, the following syntax is equivalent to specifying the default scenario.
helperLFSetup('ACC_01_ISO_TargetDiscriminationTest');
You can choose from the following scenarios.
'ACC_01_ISO_TargetDiscriminationTest' 'ACC_02_ISO_AutoRetargetTest' 'ACC_03_ISO_CurveTest' 'ACC_04_StopnGo' 'LFACC_01_DoubleCurve_DecelTarget' 'LFACC_02_DoubleCurve_AutoRetarget' 'LFACC_03_DoubleCurve_StopnGo' 'LFACC_04_Curve_CutInOut' 'LFACC_05_Curve_CutInOut_TooClose'
Open Test Bench Model
Open the Simulink test bench model.
open_system('LaneFollowingTestBenchExample')
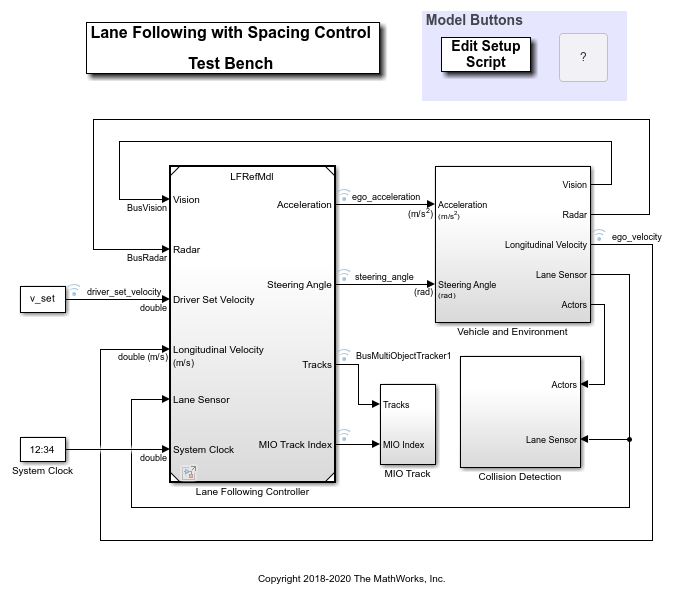
The model contains four main components:
Lane Following Controller - Controls both the longitudinal acceleration and front steering angle of the ego vehicle
Vehicle and Environment - Models the motion of the ego vehicle and models the environment
Collision Detection - Stops the simulation when a collision of the ego vehicle and lead vehicle is detected
MIO Track - Enables MIO track for display in the Bird's-Eye Scope.
Opening this model also runs the helperLFSetUp script, which initializes the data used by the model by running the scenario function and loading constants needed by the Simulink model, such as the vehicle model parameters, controller design parameters, road scenario, and surrounding cars.
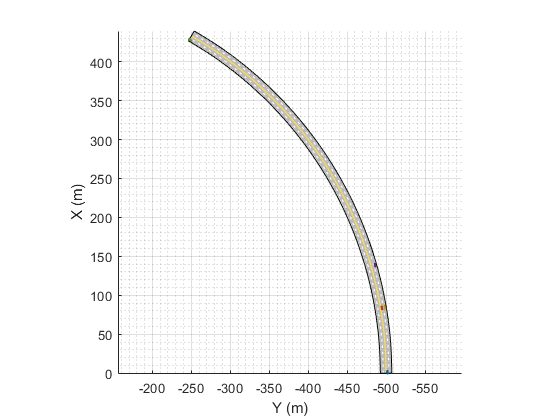
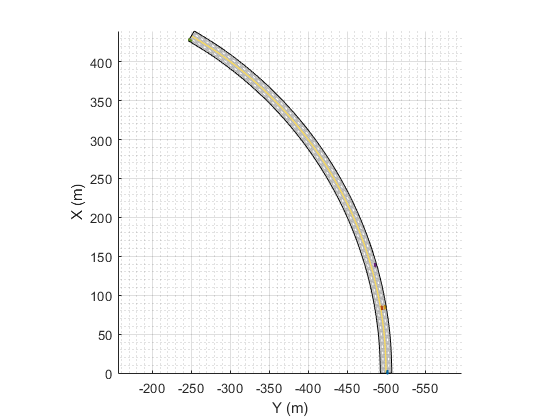
Plot the road and the path that the ego vehicle will follow.
plot(scenario)
To plot the results of the simulation and depict the ego vehicle surroundings and tracked objects, use the Bird's-Eye Scope. The Bird's-Eye Scope is a model-level visualization tool that you can open from the Simulink toolstrip. On the Simulation tab, under Review Results, click Bird's-Eye Scope. After opening the scope, set up the signals by clicking Find Signals.
To get a mid-simulation view, simulate the model for 10 seconds.
sim('LaneFollowingTestBenchExample','StopTime','10')
After simulating the model for 10 seconds, open the Bird's-Eye Scope. In the scope toolstrip, to display the World Coordinates View of the scenario, click World Coordinates. In this view, the ego vehicle is circled. To display the legend for the Vehicle Coordinates View, click Legend.
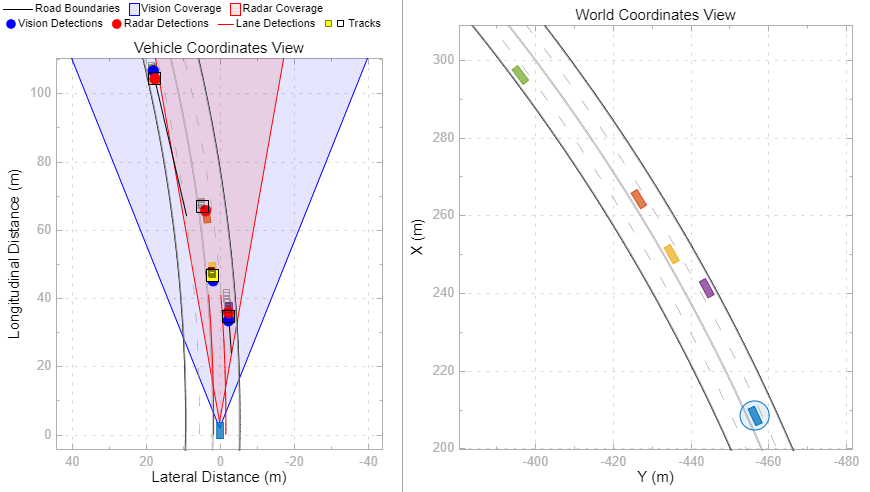
The Bird's-Eye Scope shows the results of the sensor fusion. It shows how the radar and vision sensors detect the vehicles within their coverage areas. It also shows the tracks maintained by the Multi-Object Tracker block. The yellow track shows the most important object (MIO), which is the closest track in front of the ego vehicle in its lane. The ideal lane markings are also shown along with the synthetically detected left and right lane boundaries (shown in red).
Simulate the model to the end of the scenario.
sim('LaneFollowingTestBenchExample')
Assuming no disturbance added to measured output #3. -->Assuming output disturbance added to measured output #2 is integrated white noise. Assuming no disturbance added to measured output #1. -->Assuming output disturbance added to measured output #4 is integrated white noise. -->"Model.Noise" is empty. Assuming white noise on each measured output.
Plot the controller performance.
plotLFResults(logsout,time_gap,default_spacing)
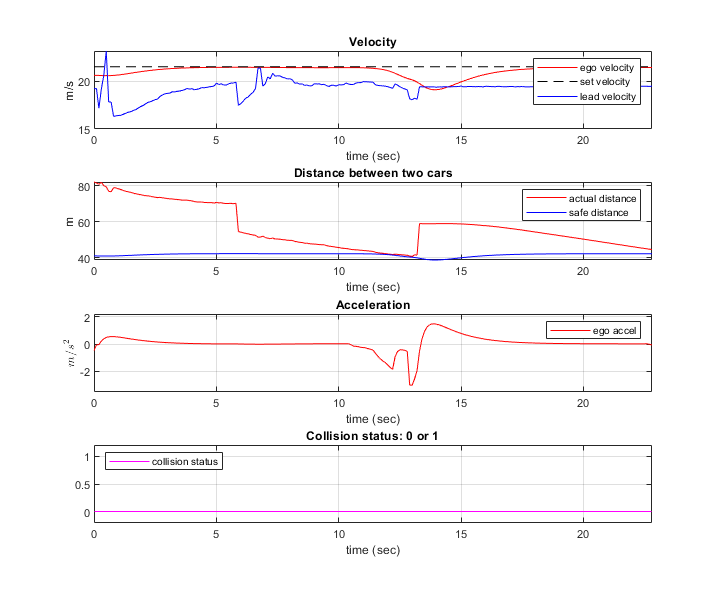
The first figure shows the following spacing control performance results.
The Velocity plot shows that the ego vehicle maintains velocity control from 0 to 11 seconds, switches to spacing control from 11 to 16 seconds, then switches back to velocity control.
The Distance between two cars plot shows that the actual distance between lead vehicle and ego vehicle is always greater than the safe distance.
The Acceleration plot shows that the acceleration for ego vehicle is smooth.
The Collision status plot shows that no collision between lead vehicle and ego vehicle is detected, thus the ego vehicle runs in a safe mode.
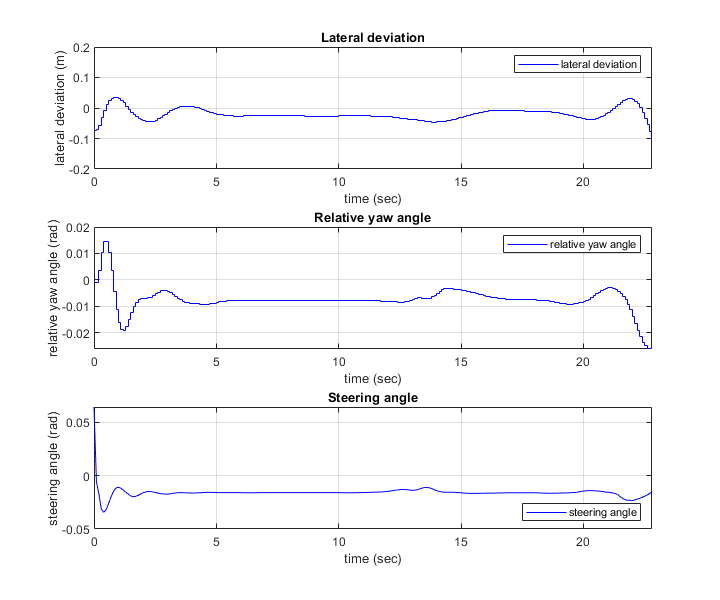
The second figure shows the following lateral control performance results.
The Lateral deviation plot shows that the distance to the lane centerline is within 0.2 m.
The Relative yaw angle plot shows that the yaw angle error with respect to lane centerline is within 0.03 rad (less than 2 degrees).
The Steering angle plot shows that the steering angle for ego vehicle is smooth.
Explore Lane Following Controller
The Lane Following Controller subsystem contains three main parts: 1) Estimate Lane Center 2) Tracking and Sensor Fusion 3) MPC Controller
open_system('LaneFollowingTestBenchExample/Lane Following Controller')
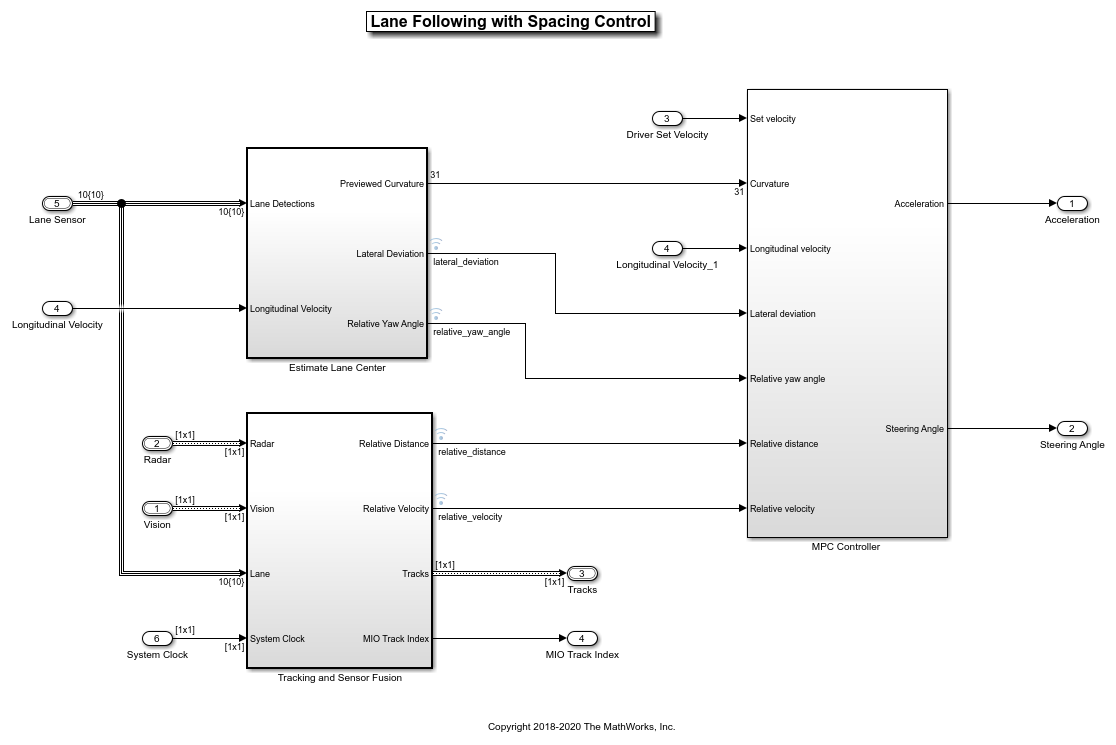
The Estimate Lane Center subsystem outputs the lane sensor data to the MPC controller. The previewed curvature provides the centerline of lane curvature ahead of the ego vehicle. In this example, the ego vehicle can look ahead for 3 seconds, which is the product of the prediction horizon and the controller sample time. The controller uses previewed information for calculating the ego vehicle steering angle, which improves the MPC controller performance. The lateral deviation measures the distance between the ego vehicle and the centerline of the lane. The relative yaw angle measures the yaw angle difference between the ego vehicle and the road. The ISO 8855 to SAE J670E block inside the subsystem converts the coordinates from Lane Detections, which use ISO 8855, to the MPC Controller which uses SAE J670E.
The Tracking and Sensor Fusion subsystem processes vision and radar detections coming from the Vehicle and Environment subsystem and generates a comprehensive situation picture of the environment around the ego vehicle. Also, it provides the lane following controller with an estimate of the closest vehicle in the lane in front of the ego vehicle.
The goals for the MPC Controller (Model Predictive Control Toolbox) block are to:
Maintain the driver-set velocity and keep a safe distance from lead vehicle. This goal is achieved by controlling the longitudinal acceleration.
Keep the ego vehicle in the middle of the lane; that is reduce the lateral deviation
 and the relative yaw angle
and the relative yaw angle  , by controlling the steering angle.
, by controlling the steering angle.Slow down the ego vehicle when road is curvy. To achieve this goal, the MPC controller has larger penalty weights on lateral deviation than on longitudinal speed.
The MPC controller is designed within the Path Following Control (PFC) System block based on the entered mask parameters, and the designed MPC Controller is an adaptive MPC which updates the vehicle model at run time. The lane following controller calculates the longitudinal acceleration and steering angle for the ego vehicle based on the following inputs:
Driver-set velocity
Ego vehicle longitudinal velocity
Previewed curvature (derived from Lane Detections)
Lateral deviation (derived from Lane Detections)
Relative yaw angle (derived from Lane Detections)
Relative distance between lead vehicle and ego vehicle (from the Tracking and Sensor Fusion system)
Relative velocity between lead vehicle and ego vehicle (from the Tracking and Sensor Fusion system)
Considering the physical limitations of the ego vehicle, the steering angle is constrained to be within [-0.26,0.26] rad, and the longitudinal acceleration is constrained to be within [-3,2] m/s^2.
Explore Vehicle and Environment
The Vehicle and Environment subsystem enables closed-loop simulation of the lane following controller.
open_system('LaneFollowingTestBenchExample/Vehicle and Environment')
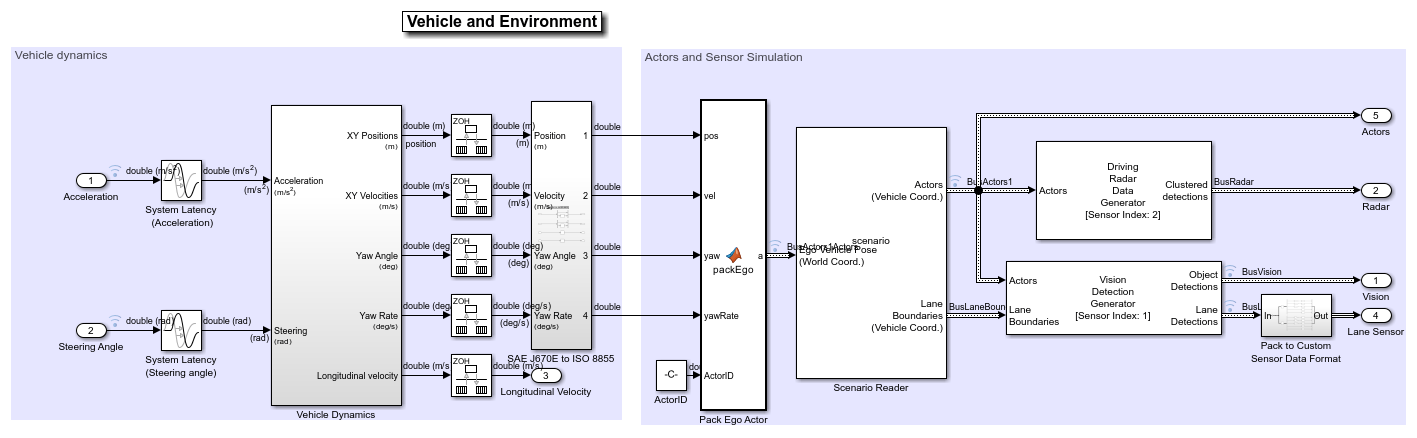
The System Latency blocks model the latency in the system between model inputs and outputs. The latency can be caused by sensor delay or communication delay. In this example, the latency is approximated by one sample time  seconds.
seconds.
The Vehicle Dynamics subsystem models the vehicle dynamics using a Bicycle Model - Force Input block from the Vehicle Dynamics Blockset™. The lower-level dynamics are modeled by a first-order linear system with a time constant of  seconds.
seconds.
The SAE J670E to ISO 8855 subsystem converts the coordinates from Vehicle Dynamics, which uses SAE J670E, to Scenario Reader, which uses ISO 8855.
The Scenario Reader block reads the actor poses data from the base workspace scenario variable. The block converts the actor poses from the world coordinates of the scenario into ego vehicle coordinates. The actor poses are streamed on a bus generated by the block. The Scenario Reader block also generates the ideal left and right lane boundaries based on the position of the vehicle with respect to the scenario used in helperLFSetUp.
The Vision Detection Generator block takes the ideal lane boundaries from the Scenario Reader block. The detection generator models the field of view of a monocular camera and determines the heading angle, curvature, curvature derivative, and valid length of each road boundary, accounting for any other obstacles. The Driving Radar Data Generator block generates clustered detections from the ground-truth data present in the field-of-view of the radar based on the radar cross-section defined in the scenario.
Run Controller for Multiple Test Scenarios
This example uses multiple test scenarios based on ISO standards and real-world scenarios. To verify the controller performance, you can test the controller for multiple scenarios and tune the controller parameters if the performance is not satisfactory. To do so:
Select the scenario by changing the scenario name input to
helperLFSetUp.Configure the simulation parameters by running
helperLFSetUp.Simulate the model with the selected scenario.
Evaluate the controller performance using
plotLFResultsTune the controller parameters if the performance is not satisfactory.
You can automate the verification and validation of the controller using Simulink Test™.
Generate Code for the Control Algorithm
The LFRefMdl model supports generating C code using Embedded Coder® software. To check if you have access to Embedded Coder, run:
hasEmbeddedCoderLicense = license('checkout','RTW_Embedded_Coder')
You can generate a C function for the model and explore the code generation report by running:
if hasEmbeddedCoderLicense slbuild('LFRefMdl') end
You can verify that the compiled C code behaves as expected using software-in-the-loop (SIL) simulation. To simulate the LFRefMdl referenced model in SIL mode, use:
if hasEmbeddedCoderLicense set_param('LaneFollowingTestBenchExample/Lane Following Controller',... 'SimulationMode','Software-in-the-loop (SIL)') end
When you run the LaneFollowingTestBenchExample model, code is generated, compiled, and executed for the LFRefMdl model, which enables you to test the behavior of the compiled code through simulation.
Conclusions
This example shows how to implement an integrated lane following controller on a curved road with sensor fusion and lane detection, test it in Simulink using synthetic data generated using Automated Driving Toolbox software, componentize it, and automatically generate code for it.
% Close any systems opened during execution of this example. endingOpenSystems = find_system('MatchFilter', @Simulink.match.allVariants); bdclose(setdiff(endingOpenSystems,startingOpenSystems))
See Also
Apps
Blocks
- Lane Keeping Assist System (Model Predictive Control Toolbox)
Topics
- Generate Code for Highway Lane Following Controller
- Automate Testing for Highway Lane Following Controls and Sensor Fusion
- Automate Testing for Highway Lane Following Controller
- Automate Real-Time Testing for Highway Lane Following Controller
- Highway Lane Following
- Adaptive Cruise Control with Sensor Fusion
- Lane Keeping Assist with Lane Detection