Multi-Object Tracker
Create and manage tracks of multiple objects
Libraries:
Automated Driving Toolbox
Description
The Multi-Object Tracker block initializes, confirms, predicts, corrects, and deletes the tracks of moving objects. Inputs to the multi-object tracker are detection reports generated by Driving Radar Data Generator and Vision Detection Generator blocks. The multi-object tracker accepts detections from multiple sensors and assigns them to tracks using a global nearest neighbor (GNN) criterion. Each detection is assigned to a separate track. If the detection cannot be assigned to any track, the multi-object tracker creates a new track.
A new track starts in a tentative state. If enough detections are assigned to a tentative track, its status changes to confirmed. When a track is confirmed, the multi-object tracker considers that track to represent a physical object. If detections are not added to the track within a specifiable number of updates, the track is deleted.
The multi-object tracker also estimates the state vector and state vector covariance matrix for each track using a Kalman filter. These state vectors are used to predict a track's location in each frame and determine the likelihood of each detection being assigned to each track.
Examples
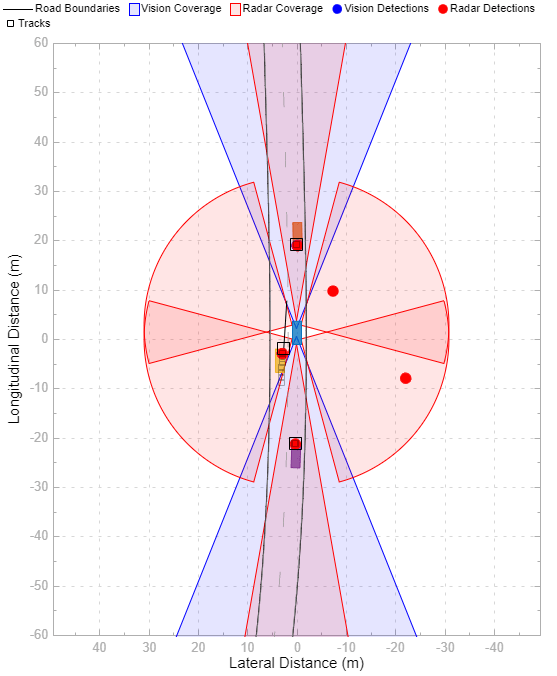
Sensor Fusion Using Synthetic Radar and Vision Data in Simulink
Implement a synthetic data simulation for tracking and sensor fusion in Simulink® with Automated Driving Toolbox™.

Adaptive Cruise Control with Sensor Fusion
Implement an automotive adaptive cruise controller using sensor fusion.
Ports
Input
Detection list, specified as a Simulink bus containing a MATLAB structure. See Group Signals or Messages into Virtual Buses (Simulink). The structure has the form:
| Field | Description | Type |
|---|---|---|
NumDetections | Number of detections | integer |
IsValidTime | False when updates are requested at times that are between block invocation intervals | Boolean |
Detections | Object detections | Array of object detection structures. The first
NumDetections of these
detections are actual detections. |
The definitions of the object detection structures are found in the Detections output port descriptions of the Driving Radar Data Generator and Vision Detection Generator blocks.
Note
The object detection structure contains a
Time field. The time tag of each object
detection must be less than or equal to the time of the current
invocation of the block. The time tag must also be greater than
the update time specified in the previous invocation of the
block.
Track update time, specified as a real scalar. The multi-object tracker updates all tracks to this time. Update time must always increase with each invocation of the block. Units are in seconds.
Note
The object detection structure contains a
Time field. The time tag of each object
detection must be less than or equal to the time of the current
invocation of the block. The time tag must also be greater than
the update time in the previous invocation of the block.
Dependencies
To enable this port, set Prediction time
source to Input
port.
Cost matrix, specified as a real-valued Nt-by-Nd matrix, where Nt is the number of existing tracks and Nd is the number of current detections.
The rows of the cost matrix correspond to the existing tracks. The columns correspond to the detections. Tracks are ordered as they appear in the list of tracks in the All Tracks output port of the previous invocation of the block.
In the first update to the multi-object tracker, or if the track has
no previous tracks, assign the cost matrix a size of [0,
Nd]. The cost must be
calculated so that lower costs indicate a higher likelihood that the
multi-object tracker assigns a detection to a track. To prevent certain
detections from being assigned to certain tracks, use
Inf.
Dependencies
To enable this port, select Enable cost matrix input.
Detectable track IDs, specified as a real-valued M-by-1 vector or M-by-2 matrix. Detectable tracks are tracks that the sensors expect to detect. The first column of the matrix contains a list of track IDs that the sensors report as detectable. The optional second column contains the detection probability for the track.
Tracks whose identifiers are not included in Detectable Track IDs are considered undetectable. The track deletion logic does not count the lack of detection as a "missed detection" for track deletion purposes.
If this port is not enabled, the tracker assumes all tracks to be detectable at each invocation of the block.
Dependencies
To enable this port, in the Port Setting tab, select Enable detectable track IDs Input.
Track state parameters, specified as a Simulink bus containing a MATLAB structure. The structure has the form:
| Field | Description |
|---|---|
NumParameters | Number of non-default state parameters, specified as a nonnegative integer |
Parameters | Array of state parameter structures |
The block uses the value of the Parameters field for the
StateParameters field of the generated tracks. You can use
these parameters to define the reference frame in which the track is reported or other
desirable attributes of the generated tracks.
For example, you can use the following structure to define a rectangular reference
frame whose origin position is at [10 10 0] meters and whose origin
velocity is [2 -2 0] meters per second with respect to the scenario
frame.
| Field Name | Value |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Dependencies
To enable this port, in the Tracker Configuration tab, select the Update track state parameters with time parameter.
Output
Confirmed tracks, returned as a Simulink bus containing a MATLAB structure. See Create Nonvirtual Buses (Simulink).
This table shows the structure fields.
| Field | Description |
|---|---|
NumTracks | Number of tracks |
Tracks | Array of track structures of a length set by the Maximum number
of tracks parameter. Only the first
NumTracks of these are actual tracks. |
This table shows the fields of each track structure.
| Field | Definition |
|---|---|
TrackID | Unique track identifier used to distinguish multiple tracks. |
BranchID | Unique track branch identifier used to distinguish multiple track branches. |
SourceIndex | Unique source index used to distinguish tracking sources in a multiple tracker environment. |
UpdateTime | Time at which the track is updated. Units are in seconds. |
Age | Number of times the track was updated. |
State | Value of state vector at the update time. |
StateCovariance | Uncertainty covariance matrix. |
ObjectClassID | Integer value representing the object classification. The value
0 represents an unknown classification. Nonzero
classifications apply only to confirmed tracks. |
TrackLogic | Confirmation and deletion logic type. This value is always
'History' for radar sensors, to indicate
history-based logic. |
TrackLogicState | Current state of the track logic type, returned as a 1-by-K logical array. K is the number of latest track logical states recorded.
In the array, |
IsConfirmed | Confirmation status. This field is true if the track
is confirmed to be a real target. |
IsCoasted | Coasting status. This field is true if the track is
updated without a new detection. |
IsSelfReported | Indicate if the track is reported by the tracker. This field is
used in a track fusion environment. It is returned as
|
ObjectAttributes | Additional information about the track. |
For more details about these fields, see objectTrack.
A track is confirmed if:
At least M detections are assigned to the track during the first N updates after track initialization. To specify the values M and N, use the M and N for the M-out-of-N confirmation parameter.
The detection initiating the track has an
ObjectClassIDgreater than zero.
Tentative tracks, returned as a Simulink bus containing a MATLAB structure. See Create Nonvirtual Buses (Simulink). A track is tentative before it is confirmed.
This table shows the structure fields.
| Field | Description |
|---|---|
NumTracks | Number of tracks |
Tracks | Array of track structures of a length set by the Maximum number
of tracks parameter. Only the first
NumTracks of these are actual tracks. |
This table shows the fields of each track structure.
| Field | Definition |
|---|---|
TrackID | Unique track identifier used to distinguish multiple tracks. |
BranchID | Unique track branch identifier used to distinguish multiple track branches. |
SourceIndex | Unique source index used to distinguish tracking sources in a multiple tracker environment. |
UpdateTime | Time at which the track is updated. Units are in seconds. |
Age | Number of times the track was updated. |
State | Value of state vector at the update time. |
StateCovariance | Uncertainty covariance matrix. |
ObjectClassID | Integer value representing the object classification. The value
0 represents an unknown classification. Nonzero
classifications apply only to confirmed tracks. |
TrackLogic | Confirmation and deletion logic type. This value is always
'History' for radar sensors, to indicate
history-based logic. |
TrackLogicState | Current state of the track logic type, returned as a 1-by-K logical array. K is the number of latest track logical states recorded.
In the array, |
IsConfirmed | Confirmation status. This field is true if the track
is confirmed to be a real target. |
IsCoasted | Coasting status. This field is true if the track is
updated without a new detection. |
IsSelfReported | Indicate if the track is reported by the tracker. This field is
used in a track fusion environment. It is returned as
|
ObjectAttributes | Additional information about the track. |
For more details about these fields, see objectTrack.
Dependencies
To enable this port, select Enable tentative tracks output.
Combined list of confirmed and tentative tracks, returned as a Simulink bus containing a MATLAB structure. See Create Nonvirtual Buses (Simulink).
This table shows the structure fields.
| Field | Description |
|---|---|
NumTracks | Number of tracks |
Tracks | Array of track structures of a length set by the Maximum number
of tracks parameter. Only the first
NumTracks of these are actual tracks. |
This table shows the fields of each track structure.
| Field | Definition |
|---|---|
TrackID | Unique track identifier used to distinguish multiple tracks. |
BranchID | Unique track branch identifier used to distinguish multiple track branches. |
SourceIndex | Unique source index used to distinguish tracking sources in a multiple tracker environment. |
UpdateTime | Time at which the track is updated. Units are in seconds. |
Age | Number of times the track was updated. |
State | Value of state vector at the update time. |
StateCovariance | Uncertainty covariance matrix. |
ObjectClassID | Integer value representing the object classification. The value
0 represents an unknown classification. Nonzero
classifications apply only to confirmed tracks. |
TrackLogic | Confirmation and deletion logic type. This value is always
'History' for radar sensors, to indicate
history-based logic. |
TrackLogicState | Current state of the track logic type, returned as a 1-by-K logical array. K is the number of latest track logical states recorded.
In the array, |
IsConfirmed | Confirmation status. This field is true if the track
is confirmed to be a real target. |
IsCoasted | Coasting status. This field is true if the track is
updated without a new detection. |
IsSelfReported | Indicate if the track is reported by the tracker. This field is
used in a track fusion environment. It is returned as
|
ObjectAttributes | Additional information about the track. |
For more details about these fields, see objectTrack.
Dependencies
To enable this port, select Enable all tracks output.
Parameters
Tracker Management
Unique tracker identifier, specified as a nonnegative integer. This
parameter is used as the SourceIndex in the outputs,
and distinguishes tracks that come from different trackers in a
multiple-tracker system. You must specify this property as a positive
integer to use the track outputs as inputs to a track fuser.
Example: 1
Kalman filter initialization function, specified as a function name.
The toolbox provides several initialization functions. For an example of
an initialization function, see initcvekf.
Detection assignment threshold, specified as a positive real scalar. To assign a detection to a track, the detection's normalized distance from the track must be less than the assignment threshold. If some detections remain unassigned to tracks that you want them assigned to, then increase the threshold. If some detections are assigned to incorrect tracks, decrease the threshold.
Confirmation parameters for track creation, specified as a two-element
vector of positive integers, [M,N]. A track is
confirmed when at least M detections are assigned to
the track during the first N updates after track
initialization. M must be less than or equal to
N.
When setting
N, consider the number of times you want the tracker to update before it confirms a track. For example, if a tracker updates every 0.05 seconds, and you allow 0.5 seconds to make a confirmation decision, setN= 10.When setting
M, take into account the probability of object detection for the sensors. The probability of detection depends on factors such as occlusion or clutter. You can reduceMwhen tracks fail to be confirmed or increaseMwhen too many false detections are assigned to tracks.
Example: [3,5]
Track deletion threshold for history logic, specified as a real-valued
1-by-2 vector of positive integers [P R]. If a
confirmed track is not assigned to any detection P
times in the last R tracker updates, then the track
is deleted.
Maximum number of tracks that the block can process, specified as a positive integer.
Maximum number of sensors that the block can process, specified as a
positive integer. This value should be greater than or equal to the
highest SensorIndex value used in the
Detections input port.
Out-of-sequence measurements handling, specified as Terminate or
neglect. Each detection has a timestamp associated with
it, td, and the tracker block has it own
timestamp, tt, which is updated in each
invocation. The tracker block considers a measurement as an OOSM if
td <
tt.
When the parameter is specified as:
Terminate— The block stops running when it encounters any out-of-sequence measurements.Neglect— The block neglects any out-of-sequence measurements and continue to run.
Specify the parameters of the track state reference frame as a
structure or a structure array. The block passes the value of this parameter to the
StateParameters field of the generated tracks. You can use these
parameters to define the reference frame in which the track is reported or other desirable
attributes of the generated tracks.
For example, you can use the following structure to define a
rectangular reference frame whose origin position is at
[10 10 0] meters and whose origin
velocity is [2 -2 0] meters per second with
respect to the scenario frame.
| Field Name | Value |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
You can update the track state parameters through the State Parameters input port by selecting the Update track state parameters with time parameter.
Data Types: struct
Select this parameter to enable the input port for track state parameters through the State Parameters input port.
Inputs and Outputs
Source for prediction time, specified as Input
port or Auto. Select
Input port to input an update time by
using the Prediction Time input port. Otherwise,
the simulation clock managed by Simulink determines the update time.
Example: Auto
Select this check box to enable the input of a cost matrix by using the Cost Matrix input port.
Select this check box to enable the Detectable Track IDs input port.
Source of output bus name, specified as Auto or
Property.
If you select
Auto, the block automatically creates a bus name.If you select
Property, specify the bus name using the Specify an output bus name parameter.
Dependencies
To enable this parameter, set the Source of output bus
name parameter to Property.
Select this check box to enable the output of tentative tracks by using the Tentative Tracks output port.
Select this check box to enable the output of all the tracks by using the All Tracks output port.
Interpreted execution— Simulate the model using the MATLAB interpreter. This option shortens startup time. InInterpreted executionmode, you can debug the source code of the block.Code generation— Simulate the model using generated C/C++ code. The first time you run a simulation, Simulink generates C/C++ code for the block. The C code is reused for subsequent simulations as long as the model does not change. This option requires additional startup time.
Extended Capabilities
When the filter initialization function specified in the block returns a
trackingEKFortrackingUKF(Sensor Fusion and Tracking Toolbox) object, the block supports static memory allocation code generation.In code generation, if the detection inputs are specified in
doubleprecision, then theNumTracksfield of the track outputs is returned as adoublevariable. If the detection inputs are specified insingleprecision, then theNumTracksfield of the track outputs is returned as auint32variable.
Version History
Introduced in R2017b
See Also
Apps
Blocks
- Scenario Reader | Driving Radar Data Generator | Detection Concatenation | Vision Detection Generator
Objects
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)