Detection Concatenation
Combine detection reports from different sensors
Libraries:
Automated Driving Toolbox
Sensor Fusion and Tracking Toolbox /
Utilities
Description
The Detection Concatenation block combines detection reports from multiple sensors onto a single output bus. Concatenation is useful when detections from multiple sensor blocks are passed into a tracker block such as the Multi-Object Tracker block. You can accommodate additional sensors by changing the Number of input sensors to combine parameter to increase the number of input ports.
Examples
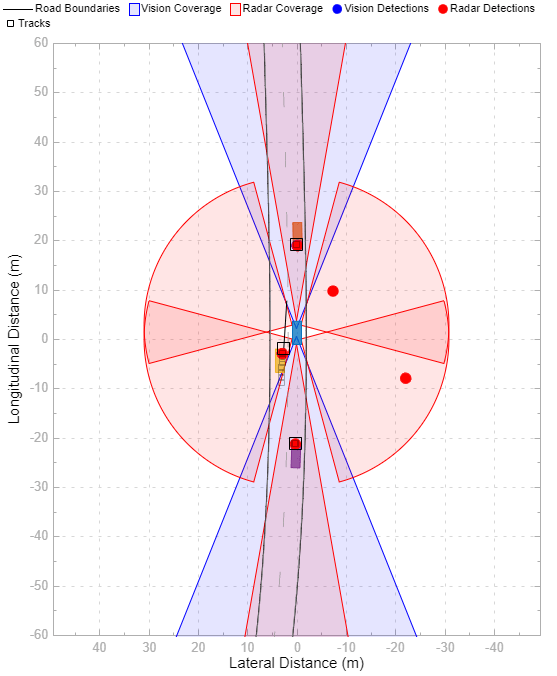
Sensor Fusion Using Synthetic Radar and Vision Data in Simulink
Implement a synthetic data simulation for tracking and sensor fusion in Simulink® with Automated Driving Toolbox™.

Adaptive Cruise Control with Sensor Fusion
Implement an automotive adaptive cruise controller using sensor fusion.