narnet
(To be removed) Nonlinear autoregressive neural network
narnet will be removed in a future release. For more information,
see Transition Legacy Neural Network Code to dlnetwork Workflows.
For advice on updating your code, see Version History.
Description
narnet(
takes these arguments:feedbackDelays,hiddenSizes,feedbackMode,trainFcn)
Row vector of increasing 0 or positive feedback delays,
feedbackDelaysRow vector of one or more hidden layer sizes,
hiddenSizesType of feedback,
feedbackModeTraining function,
trainFcn
and returns a NAR neural network.
You can train NAR (nonlinear autoregressive) neural networks to predict a time series from the past values of that series.
Examples
Train a nonlinear autoregressive (NAR) neural network and predict on new time series data. Predicting a sequence of values in a time series is also known as multistep prediction. Closed-loop networks can perform multistep predictions. When external feedback is missing, closed-loop networks can continue to predict by using internal feedback. In NAR prediction, the future values of a time series are predicted only from past values of that series.
Load the simple time series prediction data.
T = simplenar_dataset;
Create a NAR network. Define the feedback delays and size of the hidden layers.
net = narnet(1:2,10);
Prepare the time series data using preparets. This function automatically shifts input and target time series by the number of steps needed to fill the initial input and layer delay states.
[Xs,Xi,Ai,Ts] = preparets(net,{},{},T);A recommended practice is to fully create the network in an open loop, and then transform the network to a closed loop for multistep-ahead prediction. Then, the closed-loop network can predict as many future values as you want. If you simulate the neural network in closed-loop mode only, the network can perform as many predictions as the number of time steps in the input series.
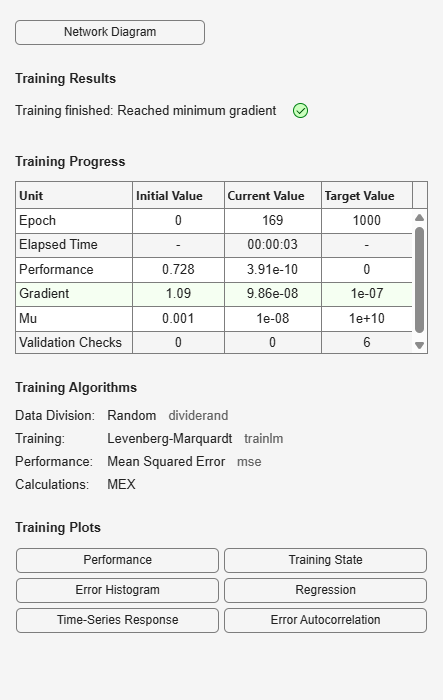
Train the NAR network. The train function trains the network in an open loop (series-parallel architecture), including the validation and testing steps.
net = train(net,Xs,Ts,Xi,Ai);
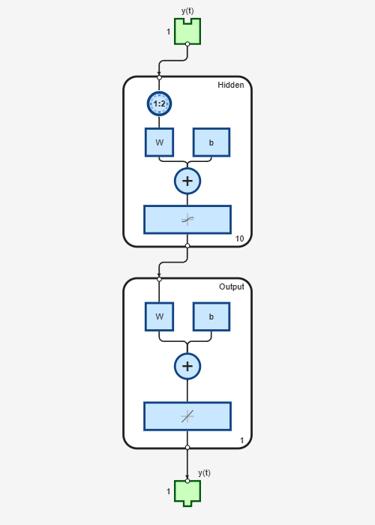
Display the trained network.
view(net)
Calculate the network output Y, final input states Xf, and final layer states Af of the open-loop network from the network input Xs, initial input states Xi, and initial layer states Ai.
[Y,Xf,Af] = net(Xs,Xi,Ai);
Calculate the network performance.
perf = perform(net,Ts,Y)
perf = 1.0100e-09
To predict the output for the next 20 time steps, first simulate the network in closed-loop mode. The final input states Xf and layer states Af of the open-loop network net become the initial input states Xic and layer states Aic of the closed-loop network netc.
[netc,Xic,Aic] = closeloop(net,Xf,Af);
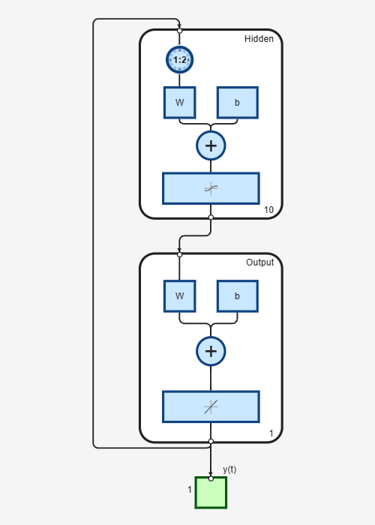
Display the closed-loop network. The network has only one input. In closed-loop mode, this input connects to the output. A direct delayed output connection replaces the delayed target input.
view(netc)
To simulate the network 20 time steps ahead, input an empty cell array of length 20. The network requires only the initial conditions given in Xic and Aic.
Yc = netc(cell(0,20),Xic,Aic)
Yc=1×20 cell array
{[0.8346]} {[0.3329]} {[0.9084]} {[1.0000]} {[0.3190]} {[0.7329]} {[0.9801]} {[0.6409]} {[0.5146]} {[0.9746]} {[0.9077]} {[0.2807]} {[0.8651]} {[0.9897]} {[0.4093]} {[0.6838]} {[0.9976]} {[0.7007]} {[0.4311]} {[0.9660]}