tpaps
Thin-plate smoothing spline
Description
st = tpaps(x,y)x(:,j) and the given data values
y(:,j). The x data sites must be distinct
2D points in the plane, whereas the y data values can be
vectors, matrices, or ND-arrays. There must be exactly as many values as there are
sites, i.e. the last dimension j must be equal for the data sites
and data values.
The thin-plate smoothing spline f is the unique minimizer of the weighted sum
with E(f) the error measure
and R(f) the roughness measure
Here, the integral is taken over all of R2, |z|2 denotes the sum of squares of all the entries of z, and Dif denotes the partial derivative of f with respect to its i-th argument, hence the integrand involves second partial derivatives of f. The function chooses the smoothing parameter p so that (1-p)/p equals the average of the diagonal entries of the matrix A, with A + (1-p)/p*eye(n) the coefficient matrix of the linear system for the n coefficients of the smoothing spline to be determined. This ensures staying in between the two extremes of interpolation (when p is close to 1 and the coefficient matrix is essentially A) and complete smoothing (when p is close to 0 and the coefficient matrix is essentially a multiple of the identity matrix). This serves as a good first guess for p.
st = tpaps(x,y,p)p, a number between 0 and 1. As the smoothing parameter varies from 0 to 1, the smoothing spline varies, from the least-squares approximation to the data by a linear polynomial when p is 0, to the thin-plate spline interpolant to the data when p is 1.
[..., also returns the value of the smoothing parameter used in the final spline result whether or not you specify P] = tpaps(...) p. This syntax is useful for experimentation in which you can start with [pp,P] = tpaps(x,y) and obtain a reasonable first guess for p.
Examples
The following code obtains values of a smooth function at 31 randomly chosen sites, adds some random noise to these values, and then uses tpaps to recover the underlying exact smooth values. To illustrate how well tpaps does in this case, the code plots, in addition to the smoothing spline, the exact values (as black balls) as well as each arrow leading from a smoothed value to the corresponding noisy value.
rng(23); nxy = 31; xy = 2*(rand(2,nxy)-.5); vals = sum(xy.^2); noisyvals = vals + (rand(size(vals))-.5)/5; st = tpaps(xy,noisyvals); fnplt(st) hold on avals = fnval(st,xy); plot3(xy(1,:),xy(2,:),vals,'wo','markerfacecolor','k') quiver3(xy(1,:),xy(2,:),avals,zeros(1,nxy),zeros(1,nxy), ... noisyvals-avals,'r') hold off

The following code uses an interpolating thin-plate spline to vector-valued data values to construct a map, from the plane to the plane, that carries the unit square approximately onto the unit disk .
n = 64;
t = linspace(0,2*pi,n+1);
t(end) = [];
values = [cos(t); sin(t)];
centers = values./repmat(max(abs(values)),2,1);
st = tpaps(centers, values, 1);
fnplt(st)
axis equal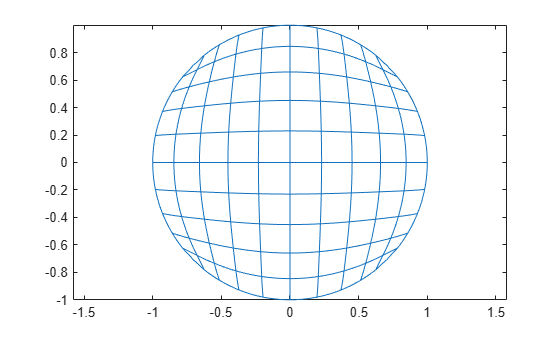
Note the choice of 1 for the smoothing parameter here, to obtain interpolation.
Input Arguments
Output Arguments
Limitations
The determination of the smoothing spline involves the solution of a linear system with as many unknowns as there are data points. Since the matrix of this linear system is full, the solving can take a long time even if, as is the case here, an iterative scheme is used when there are more than 728 data points. The convergence speed of that iteration is strongly influenced by p, and is slower the larger p is. So, for large problems, use interpolation, i.e., p equal to 1, only if you can afford the time.
Version History
Introduced in R2006b