LPV System
Simulate linear parameter-varying (LPV) systems
Libraries:
Control System Toolbox /
Linear Parameter Varying
Description
A linear parameter-varying (LPV) system is a linear state-space model whose dynamics vary as a function of certain time-varying parameters called scheduling parameters. In MATLAB®, an LPV model is represented in a state-space form using coefficients that are parameter dependent.
Mathematically, you can represent an LPV system as follows.
Here:
u(t) are the inputs
y(t) are the outputs
x(t) are the model states with initial value xinit
is the state derivative vector for continuous-time systems and the state update vector x[k+1] for discrete-time systems. Here, k is the integer index that counts the number of sampling periods Ts.
A(p), B(p), C(p), and D(p) are the state-space matrices parameterized by the scheduling parameter vector p.
The parameters p = p(t) are measurable functions of the inputs and the states of the model. They can be a scalar quantity or a vector of several parameters. The set of scheduling parameters define the scheduling space over which the LPV model is defined.
dx0(p), x0(p), u0(p), and y0(p) are the offsets in the values of , x(t), u(t) and y(t) at a given parameter value p = p(t) or p[k].
You can obtain the offsets by returning additional linearization information when calling functions such as
linearize(Simulink Control Design) orgetIOTransfer(Simulink Control Design). For an example, see LPV Approximation of Boost Converter Model (Simulink Control Design).
Caution
Avoid making C(p) and D(p) depend on the system output y. Otherwise, the resulting state-space equation y = C(y)x + D(y)u creates an algebraic loop, because computing the output value y requires knowing the output value. This algebraic loop is prone to instability and divergence. Instead, try expressing C and D in terms of the time t, the block input u, and the state outputs x.
For similar reasons, avoid scheduling A(p) and B(p) based on the dx output. Note that it is safe for A and B to depend on y when y is a fixed combination of states and inputs (in other words, when y = Cx + Du, where C and D are constant matrices).
The block implements a grid-based representation of the LPV system. You pick a grid of
values for the scheduling parameters. At each value p =
p*, you specify the corresponding linear system as a state-space
(ss or idss (System Identification Toolbox)) model object. You use the generated array of state-space models to
configure the LPV System block.
The block accepts an array of state-space models with operating point information. The
block extracts the information on the scheduling variables from the
SamplingGrid property of the LTI array. The scheduling variables define
the grid of the LPV models. They are scalar-valued quantities that can be functions of time,
inputs and states, or constants. They are used to pick the local dynamics in the operating
space. The software interpolates the values of these variables. The block uses this array with
data interpolation and extrapolation techniques for simulation.
Examples
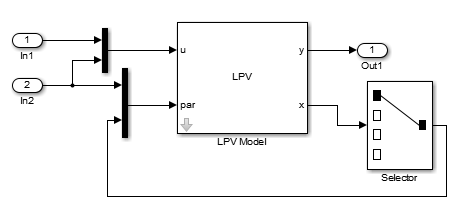
Consider a 2-input, 3-output, 4-state LPV model. Use input
u(2) and state x(1) as scheduling parameters.
Configure the Simulink® model as shown in the following figure.
Consider a linear mass-spring-damper system whose mass changes as a function of an external load command. The governing equation is as follows:
Here, is the mass dependent upon the external command , is the damping ratio, is the stiffness of the spring, and is the forcing input. is position of the mass at a given time . For a fixed value of , the system is linear and expressed as
,
where is the state vector and is the value of the mass for a given value of .
In this example, you want to study the model behavior over a range of input values from 1 to 10 Volts. For each value of , measure the mass and compute the linear representation of the system. Suppose mass is related to the input by the relationship . For values of u ranging from 1 to 10 results in the following array of linear systems.
c = 5; k = 300; u = 1:10; m = 10*u + 0.1*u.^2; for i = 1:length(u) A = [0 1; -k/m(i), -c/m(i)]; B = [0; 1/m(i)]; C = [1 0]; sys(:,:,i) = ss(A,B,C,0); end
The variable is the scheduling input. Add this information to the model.
sys.SamplingGrid = struct('LoadCommand',u);Configure the LPV System block:
Type
sysin the State-space array field.Connect the input port
parto a one-dimensional source signal that generates the values of the load command. If the source provides values between 1 and 10, the block uses interpolation to compute the linear model at a given time instance. Otherwise, the block uses extrapolation.
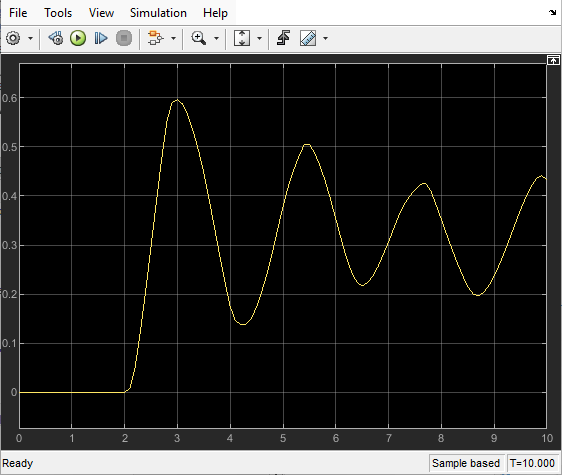
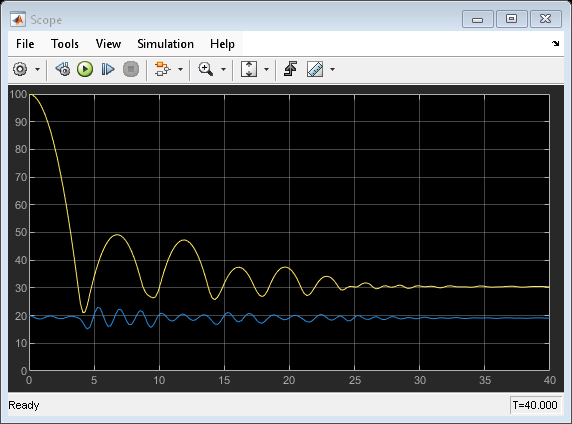
Simulate the LPV model to a constant forcing input of 100 N and random values for the load command scheduling variable.
model = "simMSDLPV";
open_system(model);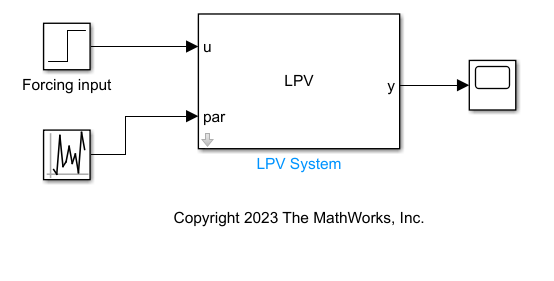
This example shows how to simulate a linear parameter-varying (LPV) model of an engine speed using the LPV System block. The LPV System block interpolates a state-space array to model the LPV response. Typically, you can obtain such an array by batch linearizing a nonlinear model over a range of operating conditions. This example provides a linearized result of the engine speed model in scdspeedlpvData. For more information about linearizing this model, see Linearize Engine Speed Model (Simulink Control Design).
Open the model.
model = "scdspeedLPVCompare";
open_system(model);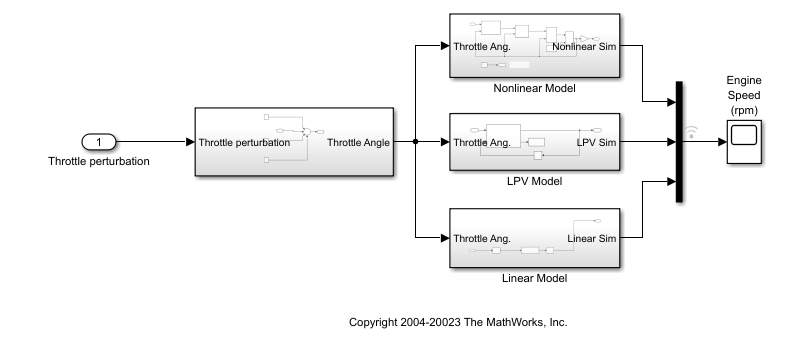
Load the linearization result for implementing the LPV model.
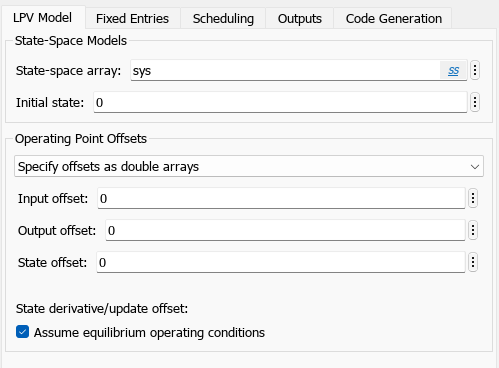
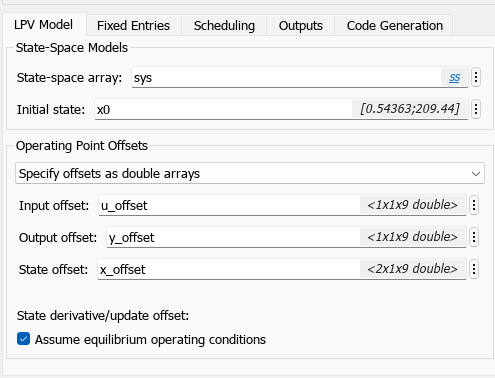
load scdspeedlpvData.matThe LPV model is implemented under the LPV Model subsystem.
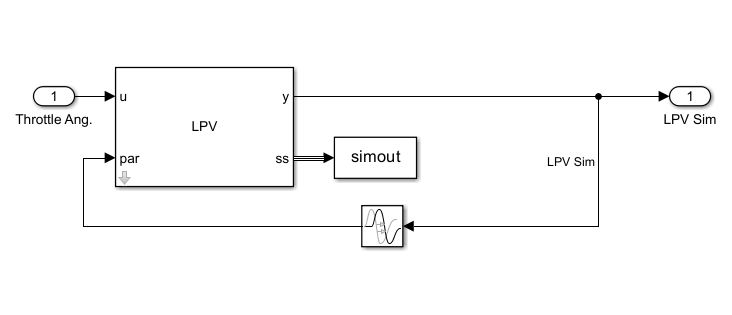
The LPV System block takes the throttle angle as an input and uses the speed output as scheduling variable. The block parameters are configured as shown in this image. Here, the state-space array sys and offsets are obtained by batch linearizing the nonlinear model.
Simulate the model and plot the response comparison.
sim(model);
plot(logsOut{1}.Values.Time,logsOut{1}.Values.Data)
grid on
legend("Nonlinear sim","LPV sim","LTI sim",Location="best")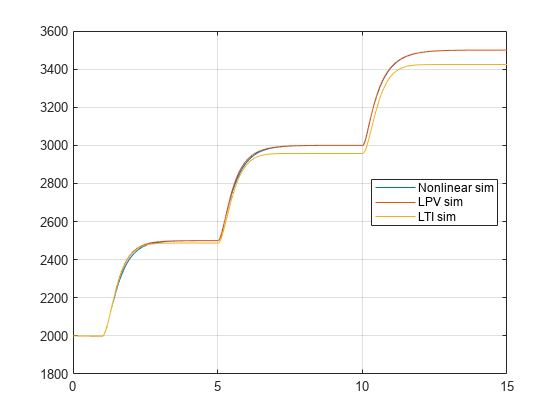
The LPV model provides a good approximation of the nonlinear response.
Extended Examples
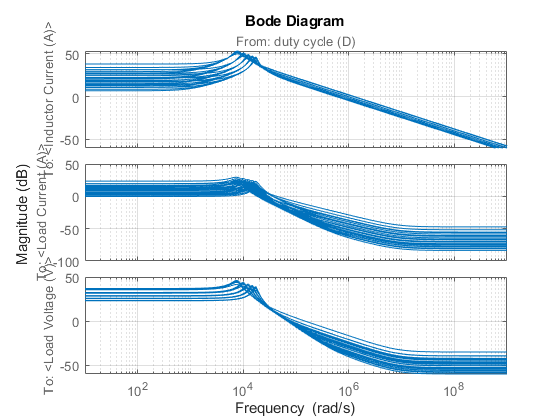
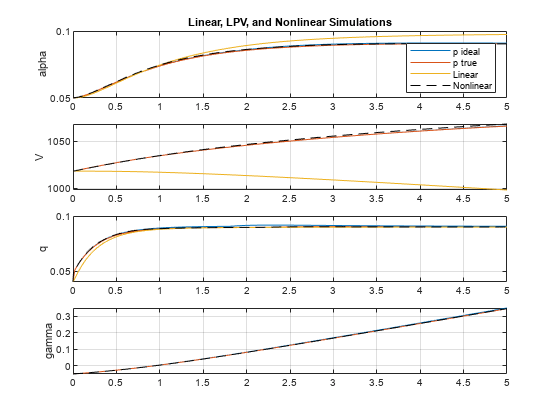
LPV Approximation of Boost Converter Model
Approximate a nonlinear Simscape™ Electrical™ model using a linear parameter varying model.
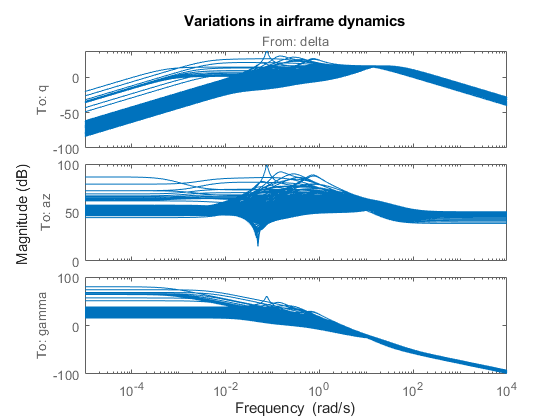
Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model.
Using LTI Arrays for Simulating Multi-Mode Dynamics
Construct a Linear Parameter Varying (LPV) representation of a system that exhibits multi-mode dynamics.
Approximate Nonlinear Behavior Using Array of LTI Systems
You can use linear parameter varying models to approximate the dynamics of nonlinear systems.
Limitations
Internal delays cannot be extrapolated to be less than their minimum value in the state-space model array.
When using an scattered grid of linear models to define the LPV system, only the nearest neighbor interpolation scheme is used. This may reduce the accuracy of simulation results. It is recommended to work with rectangular grids created using
ndgrid.