stepinfo
Rise time, settling time, and other step-response characteristics
Syntax
Description
stepinfo lets you compute step-response characteristics
for a dynamic system model or for an array of step-response data. For a step response
y(t), stepinfo computes
characteristics relative to yinit and
yfinal, where
yinit is the initial offset, that is,
the value before the step is applied, and
yfinal is the steady-state value of the
response. These values depend on the syntax you use.
For a dynamic system model
sys,stepinfouses yinit = 0 and yfinal = steady-state value.For an array of step-response data
[y,t],stepinfouses yinit = 0 and yfinal = last sample value ofy, unless you explicitly specify these values.
For more information on how stepinfo computes the step-response
characteristics, see Algorithms.
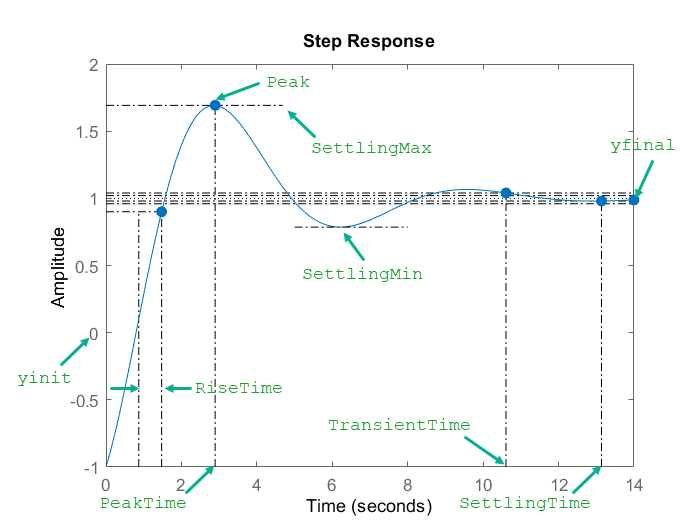
The following figure illustrates some of the characteristics
stepinfo computes for a step response. For this response, assume
that y(t) = 0 for t < 0, so
yinit = 0.
S = stepinfo(y,t)y and a corresponding time vector
t. For SISO system responses, y is
a vector with the same number of entries as t. For MIMO
response data, y is an array containing the responses of
each I/O channel. This syntax uses
yinit = 0 and the last value in
y (or the last value in each channel's corresponding
response data) as yfinal.
S = stepinfo(y,t,yfinal)yfinal. This syntax is useful when you know that the
expected steady-state system response differs from the last value in
y for reasons such as measurement noise. This syntax
uses yinit = 0.
For SISO responses, t and y are vectors
with the same length NS. For systems with
NU inputs and NY outputs, you can
specify y as an
NS-by-NY-by-NU
array (see step) and
yfinal as an
NY-by-NU array.
stepinfo then returns a
NY-by-NU structure array
S of response characteristics corresponding to each I/O
pair.
S = stepinfo(y,t,yfinal,yinit)yinit. This syntax is useful when your
y data has an initial offset; that is,
y is nonzero before the step occurs.
For SISO responses, t and y are vectors
with the same length NS. For systems with
NU inputs and NY outputs, you can
specify y as an
NS-by-NY-by-NU
array and yinit as an
NY-by-NU array.
stepinfo then returns a
NY-by-NU structure array
S of response characteristics corresponding to each I/O
pair.
S = stepinfo(___,RiseTimeLimits=RT)RT
= [0.1 0.9]). The upper threshold RT(2) is also
used to calculate SettlingMin and
SettlingMax. These values are the minimum and maximum
values of the response occurring after the response reaches the upper threshold.
You can use this syntax with any of the previous input-argument combinations.
Examples
Compute step-response characteristics, such as rise time, settling time, and overshoot, for a dynamic system model. For this example, use a continuous-time transfer function:
.
Create the transfer function and examine its step response.
sys = tf([1 5 5],[1 1.65 5 6.5 2]); stepplot(sys)
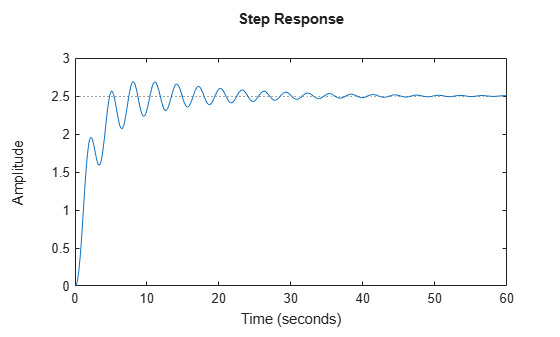
The plot shows that the response rises in a few seconds, and then rings down to a steady-state value of about 2.5. Compute the characteristics of this response using stepinfo.
S = stepinfo(sys)
S = struct with fields:
RiseTime: 3.8456
TransientTime: 27.9762
SettlingTime: 27.9762
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
Here, the function uses = 0 to compute characteristics for the dynamic system model sys.
By default, the settling time is the time it takes for the error to stay below 2% of . The result S.SettlingTime shows that for sys, this condition occurs after about 28 seconds. The default definition of rise time is the time it takes for the response to go from 10% to 90% of the way from = 0 to . S.RiseTime shows that for sys, this rise occurs in less than 4 seconds. The maximum overshoot is returned in S.Overshoot. For this system, the peak value S.Peak, which occurs at the time S.PeakTime, overshoots by about 7.5% of the steady-state value.
For a MIMO system, stepinfo returns a structure array in which each entry contains the response characteristics of the corresponding I/O channel of the system. For this example, use a two-output, two-input discrete-time system. Compute the step-response characteristics.
A = [0.68 -0.34; 0.34 0.68]; B = [0.18 -0.05; 0.04 0.11]; C = [0 -1.53; -1.12 -1.10]; D = [0 0; 0.06 -0.37]; sys = ss(A,B,C,D,0.2); S = stepinfo(sys)
S=2×2 struct array with fields:
RiseTime
TransientTime
SettlingTime
SettlingMin
SettlingMax
Overshoot
Undershoot
Peak
PeakTime
Access the response characteristics for a particular I/0 channel by indexing into S. For instance, examine the response characteristics for the response from the first input to the second output of sys, corresponding to S(2,1).
S(2,1)
ans = struct with fields:
RiseTime: 0.4000
TransientTime: 2.8000
SettlingTime: 3
SettlingMin: -0.6724
SettlingMax: -0.5188
Overshoot: 24.6476
Undershoot: 11.1224
Peak: 0.6724
PeakTime: 1
To access a particular value, use dot notation. For instance, extract the rise time of the (2,1) channel.
rt21 = S(2,1).RiseTime
rt21 = 0.4000
Since R2026a
When you specify an array of LTI systems, stepinfo returns a structure array with dimensions that match the specified model array. Each element of the structure array contains the characteristics of the corresponding LTI model in the model array.
Create a 3-by-1 array of second-order SISO models with different damping ratios.
sys1 = tf(4,[1 1 4]); sys2 = tf(4,[1 2 4]); sys3 = tf(4,[1 4 4]); sysArray = stack(1,sys1,sys2,sys3);
View the dimensions of the resulting model array.
size(sysArray)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
Compute the step-response characteristics for the model array.
infoArray = stepinfo(sysArray)
infoArray = 1×1×3 struct array with fields:
RiseTime
TransientTime
SettlingTime
SettlingMin
SettlingMax
Overshoot
Undershoot
Peak
PeakTime
You can use SettlingTimeThreshold and RiseTimeLimits to change the default percentage for settling and rise times, respectively, as described in the Algorithms section. For this example, use the system given by:
.
Create the transfer function.
sys = tf([1 5 5],[1 1.65 5 6.5 2]);
Compute the time it takes for the error in the response of sys to stay below 0.5% of the gap . To do so, set SettlingTimeThreshold to 0.5%, or 0.005.
S1 = stepinfo(sys,SettlingTimeThreshold=0.005); st1 = S1.SettlingTime
st1 = 46.1325
Compute the time it takes the response of sys to rise from 5% to 95% of the way from to . To do so, set RiseTimeLimits to a vector containing those bounds.
S2 = stepinfo(sys,RiseTimeLimits=[0.05 0.95]); rt2 = S2.RiseTime
rt2 = 4.1690
You can define percentages for both settling time and rise time in the same computation.
S3 = stepinfo(sys,... SettlingTimeThreshold=0.005, ... RiseTimeLimits=[0.05 0.95])
S3 = struct with fields:
RiseTime: 4.1690
TransientTime: 46.1325
SettlingTime: 46.1325
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
You can extract step-response characteristics from step-response data even if you do not have a model of your system. For instance, suppose you have measured the response of your system to a step input and saved the resulting response data in a vector y of response values at the times stored in another vector t. Load the response data and examine it.
load StepInfoData t y plot(t,y)
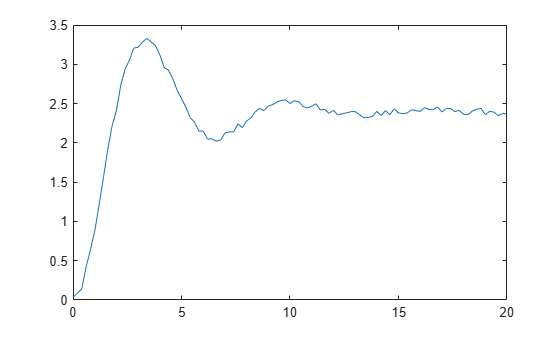
Compute step-response characteristics from this response data using stepinfo. If you do not specify the steady-state response value yfinal, then stepinfo assumes that the last value in the response vector y is the steady-state response. Because the data has some noise, the last value in y is likely not the true steady-state response value. When you know what the steady-state value should be, you can provide it to stepinfo. For this example, suppose that the steady-state response is 2.4.
S1 = stepinfo(y,t,2.4)
S1 = struct with fields:
RiseTime: 1.2897
TransientTime: 19.6478
SettlingTime: 19.6439
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
Because of the noise in the data, the default definition of the settling time is too stringent, resulting in an arbitrary value of almost 20 seconds. To allow for the noise, increase the settling-time threshold from the default 2% to 5%.
S2 = stepinfo(y,t,2.4,SettlingTimeThreshold=0.05)
S2 = struct with fields:
RiseTime: 1.2897
TransientTime: 10.4201
SettlingTime: 10.4149
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
Settling time and transient time are equal when the peak error is equal to the gap , which is the case for models with no undershoot or feedthrough and with less than 100% overshoot. They tend to differ for models with feedthrough, zeros at the origin, unstable zeros (undershoot), or large overshoot.
Consider the following models.
sys1— System with direct feedthroughsys2— System with zero at originsys3— Nonminimum phase system with undershootsys4— System with large overshoot
s = tf("s"); sys1 = 1+tf(1,[1 1]); sys2 = tf([1 0],[1 1]); sys3 = tf([-3 1],[1 2 1]); sys4 = (s/0.5 + 1)/(s^2 + 0.2*s + 1); step(sys1,sys2,sys3,sys4) grid on legend("Feedthrough", ... "Zero at origin", ... "Nonminimum phase with undershoot", ... "Large overshoot")

Compute the step-response characteristics.
S1 = stepinfo(sys1)
S1 = struct with fields:
RiseTime: 1.6095
TransientTime: 3.9121
SettlingTime: 3.2190
SettlingMin: 1.8005
SettlingMax: 1.9993
Overshoot: 0
Undershoot: 0
Peak: 1.9993
PeakTime: 7.3222
S2 = stepinfo(sys2)
S2 = struct with fields:
RiseTime: 0
TransientTime: 3.9121
SettlingTime: NaN
SettlingMin: 6.6069e-04
SettlingMax: 1
Overshoot: Inf
Undershoot: Inf
Peak: 1
PeakTime: 0
S3 = stepinfo(sys3)
S3 = struct with fields:
RiseTime: 2.9198
TransientTime: 6.5840
SettlingTime: 7.3229
SettlingMin: 0.9008
SettlingMax: 1.0000
Overshoot: 0
Undershoot: 88.9301
Peak: 1.0000
PeakTime: 14.6905
S4 = stepinfo(sys4)
S4 = struct with fields:
RiseTime: 0.3896
TransientTime: 40.3317
SettlingTime: 46.5052
SettlingMin: -0.2796
SettlingMax: 2.7571
Overshoot: 175.7137
Undershoot: 27.9629
Peak: 2.7571
PeakTime: 1.8850
Examine the plots and characteristics. For these models, the settling time and transient time differ because the peak error exceeds the gap between the initial and the final value. For models such as sys2, the settling time is returned as NaN because the steady-state value is zero.
In this example, you compute the step-response characteristics from step-response data that has an initial offset. This means that the value of the response data is nonzero before the step occurs.
Load the step-response data and examine the plot.
load stepDataOffset.mat
plot(stepOffset.Time,stepOffset.Data)
If you do not specify yfinal and yinit, then stepinfo assumes that yfinal is the last value in the response vector y and yinit is zero. When you know what the steady-state and initial values are, you can provide them to stepinfo. Here, the steady state of the response yfinal is 0.9 and the initial offset yinit is 0.2.
Compute step-response characteristics from this response data.
S = stepinfo(stepOffset.Data,stepOffset.Time,0.9,0.2)
S = struct with fields:
RiseTime: 0.0084
TransientTime: 1.0662
SettlingTime: 1.0662
SettlingMin: 0.8461
SettlingMax: 1.0878
Overshoot: 26.8259
Undershoot: 0.0429
Peak: 0.8878
PeakTime: 1.0225
Here, the peak value of this response is 0.8878 because stepinfo measures the maximum deviation from yinit.
Input Arguments
Dynamic system, specified as a SISO or MIMO dynamic system model.
You can also specify an array of dynamic system models, which is useful for batch-processing a family of related models. (since R2026a)
You can use these types of dynamic systems:
Continuous-time or discrete-time numeric LTI models, such as
tf,zpk, orssmodels.Generalized or uncertain LTI models such as
genssoruss(Robust Control Toolbox) models. (Using uncertain models requires Robust Control Toolbox™ software.) For generalized models,stepinfocomputes the step-response characteristics using the current value of tunable blocks and the nominal value of uncertain blocks.Identified LTI models, such as
idtf(System Identification Toolbox),idss(System Identification Toolbox), oridproc(System Identification Toolbox) models. (Using identified models requires System Identification Toolbox™ software.)
Step-response data, specified as one of the following:
For SISO response data, a vector of length
Ns, whereNsis the number of samples in the response dataFor MIMO response data, an
Ns-by-Ny-by-Nuarray, whereNyis the number of system outputs andNuis the number of system inputs
You can specify complex response
data using y. (since R2025a)
Time vector corresponding to the response data in y,
specified as a vector of length Ns.
Steady-state value, specified as a scalar or an array.
For SISO response data, specify a scalar value.
For MIMO response data, specify an
Ny-by-Nuarray, where each entry provides the steady-state response value for the corresponding system channel.
You can specify a complex final
value using yfinal. (since R2025a)
If you do not provide yfinal, then
stepinfo uses the last value in the corresponding
channel of y as the steady-state response value.
This argument is only supported when you provide step-response data as an
input. For a dynamic system model sys as an input,
stepinfo uses
yfinal = steady-state
value to compute the characteristics that depend on this value.
Value of y before the step occurs, specified as a
scalar or an array.
For SISO response data, specify a scalar value.
For MIMO response data, specify an
Ny-by-Nuarray, where each entry provides the response initial value for the corresponding system channel.
You can specify a complex initial
value using yinit. (since R2025a)
If you do not provide yinit, then
stepinfo uses zero as the response initial
value.
The response y(0) at t = 0 is equal to yinit for systems without feedthrough. However, the two quantities differ in the presence of feedthrough because of the discontinuity at t = 0.
For example, the following figure shows the step response of a system with
feedthrough sys = tf([-1 0.2 1],[1 0.7 1]).

Here, yinit is zero and the feedthrough value is –1.
This argument is only supported when you provide step-response data as an
input. For a dynamic system model sys as an input,
stepinfo uses
yinit = 0 to compute the
characteristics that depend on this value.
Threshold for defining settling and transient times, specified as a scalar
value between 0 and 1. To change the default settling and transient time
definitions (see Algorithms), set
ST to a different value. For instance, to measure
when the error falls below 5%, set ST to 0.05.
Threshold for defining rise time, specified as a 2-element row vector of
nondescending values between 0 and 1. To change the default rise time
definition (see Algorithms), set
RT to a different value. For instance, to define
the rise time as the time it takes for the response to rise from 5% to 95%
from the initial value to the steady-state value, set
RT to [0.05 0.95].
Output Arguments
Algorithms
For a step response y(t),
stepinfo computes characteristics relative to
yinit and
yfinal. By default, for a dynamic
system model sys, stepinfo uses
yinit = 0 and
yfinal = steady-state value.
This table shows how stepinfo computes each
characteristic.
| Step-Response Characteristic | Description |
|---|---|
RiseTime | Time it takes for the response to rise from 10% to 90% of the way from yinit to yfinal |
TransientTime | The first time T such that the error |y(t) – yfinal| ≤ SettlingTimeThreshold × emax for t ≥ T, where emax is the maximum error |y(t) – yfinal| for t ≥ 0. By default, SettlingTimeThreshold = 0.02 (2% of the peak error). Transient time measures how quickly the transient dynamics die off. |
SettlingTime | The first time T such that the error |y(t) – yfinal| ≤ SettlingTimeThreshold × |yfinal – yinit| for t ≥ T. By
default, |
SettlingMin | Minimum value of y(t) once the response has risen |
SettlingMax | Maximum value of y(t) once the response has risen |
Overshoot | Percentage overshoot. Relative to the normalized response ynorm(t) = (y(t) – yinit)/(yfinal – yinit), the overshoot is the larger of zero and 100 × max(ynorm(t) – 1). |
Undershoot | Percentage undershoot. Relative to the normalized response ynorm(t), the undershoot is the smaller of zero and –100 × min(ynorm(t) ). |
Peak | Peak value of |y(t) – yinit| |
PeakTime | Time at which the peak value occurs |
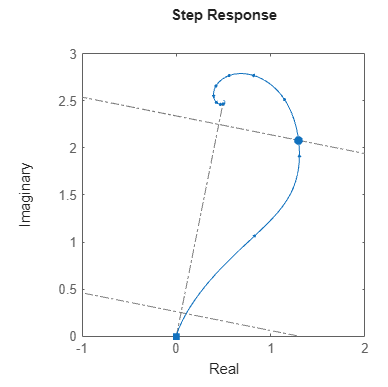
For complex responses,
stepinfo computes RiseTime,
Overshoot, and Undershoot from the projection
of y(t) onto the ray joining
yinit to
yfinal. All other characteristics of
complex responses have the same definition as in the preceding table and are computed
based on the magnitudes of the complex values in y,
yinit, and
yfinal. The following figure shows the
10% and 90% rise-time points projected onto the ray from
yinit to
yfinal. (since R2025a)